






























عبدالرحمن رجب a علیرضا عبداللهی b ,کریم رجب c , Horst Treiblmaier d,
- a د مدیریت او قانون څانګه، د اقتصاد پوهنځی، د روم تور ورګاتا پوهنتون، د کولمبیا له لارې، 2، روم 00133، ایټالیا
- b د سوداګرۍ ادارې څانګه، د مدیریت پوهنځی، خوارزمي پوهنتون، ۱۵۹۹۹۶۴۵۱۱ تهران، ایران
- c د بیزرت د علومو پوهنځی، د کارتاج پوهنتون، زرزونا، ۷۰۲۱ بیزرته، تونس
- d د نړیوال مدیریت ښوونځی، ماډل پوهنتون ویانا، ام کاهلنبرګ 1، 1190 ویانا، اتریش
| د مقالې معلومات | لنډیز |
| عمده: ډرون UAV دقیقه کرنه د هغه شيان د انټرنېټ Bibliometrics | ډرون، چې د بې پیلوټه الوتکو (UAV) په نوم هم یادیږي، په وروستیو لسیزو کې د پام وړ پرمختګ شاهدان دي. د کرنې په برخه کې، دوی د کروندګرو لپاره د پام وړ لګښت سپمولو په وړاندې کولو سره د کرنې طرزالعملونه بدل کړي، زیات شوي عملیاتي موثریت، او غوره ګټه. په تیرو لسیزو کې، د کرهنیزو ډرونونو موضوع ده د پام وړ اکادمیک پاملرنه راجلب کړه. له همدې امله موږ د بائبلیومیټریک پراساس یوه پراخه بیاکتنه ترسره کوو د موجوده اکاډمیک ادبیاتو لنډیز او جوړښت او د اوسني څیړنې تمایلات او ځایونه څرګندول. موږ د بایبلیومیټریک تخنیکونه پلي کړئ او د کرنیزو ډرون شاوخوا ادب تحلیل کړئ ترڅو لنډیز او پخوانۍ څیړنې ارزول. زموږ تحلیل ښیي چې د ریموټ سینسنګ، دقیق کرهنه، ژوره زده کړه، د ماشین زده کړه، او د شیانو انټرنیټ د کرهنیز ډرون پورې اړوند مهم موضوعات دي. همغږي اقتباس تحلیل په ادبیاتو کې شپږ پراخې څیړنې کلسترونه څرګندوي. دا څیړنه د کرنې په برخه کې د ډرون څیړنې لنډیز کولو او د راتلونکي څیړنې لارښوونې وړاندیز کولو لپاره یو له لومړیو هڅو څخه دی. |
پېژندنه
کرنه د نړۍ د خوراکي توکو لومړنۍ سرچینه ده (Friha et al., 2021)، او دا د سختو ننګونو سره مخ ده.
د خوراکي محصولاتو، د خوړو خوندیتوب، او امنیتي اندیښنو لپاره د تقاضا زیاتوالی او همدارنګه د چاپیریال ساتنې، د اوبو ساتنه، او
پایښت (Inoue, 2020). اټکل کیږي چې دا پرمختګ به دوام ومومي ځکه چې د نړۍ نفوس تر 9.7 پورې 2050 ملیارد اټکل کیږي.
(۲۰۱۹). څرنګه چې کرنه د نړۍ په کچه د اوبو د مصرف ترټولو غوره بیلګه ده، نو تمه کیږي چې د خوړو غوښتنه او اوبه
مصرف به په راتلونکي کې په ډراماتیک ډول زیات شي. سربیره پردې ، د سرې او آفت وژونکو مصرف مخ په ډیریدو دی
د کرنې د فعالیتونو د شدت سره یوځای کولی شي د راتلونکي چاپیریال ننګونو لامل شي. په ورته ډول، د کرنې وړ ځمکې محدودې دي، او
په ټوله نړۍ کې د بزګرانو شمیر کمیږي. دا ننګونې د نوښتګرو او دوامداره کرنې حلونو اړتیا ټینګار کوي (ایلیا
et al.، 2018؛ فریحه او نور، ۲۰۲۱؛ انوو، ۲۰۲۰؛ Tzounis et al.، 2021).
د نوو ټیکنالوژیو شاملول د دې ننګونو په نښه کولو لپاره د امید وړ حل په توګه پیژندل شوي. سمارټ کرنه (Brewster et al.,
۲۰۱۷; Tang et al., 2017) او دقیق کرنه (Feng et al., 2021; Khanna & Kaur, 2019) د دې ډول بحثونو په پایله کې راڅرګند شوي. د
پخوانی د کرنې په فعالیتونو کې د معلوماتو د مخابراتو ټیکنالوژیو (ICT) او نورو عصري نوښتونو غوره کولو لپاره عمومي نظر دی ترڅو موثریت او موثریت زیات کړي (Haque et al., 2021). وروستنۍ تمرکز د ساحې ځانګړي مدیریت باندې دی چې ځمکه په کې ویشل شوې ده
همجنسي برخې، او هره برخه د کرنې د حاصلاتو د اصلاح لپاره د کرهنیز محصول دقیق مقدار ترلاسه کوي د نوي ټیکنالوژیو له لارې (Feng et al., 2019; Khanna & Kaur, 2019). مشهور ټیکنالوژي چې پدې برخه کې یې د پوهانو پام ځانته اړولی دی عبارت دي له بې سیم سینسر شبکې (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016)، د شیانو انټرنیټ (IoT) (Gill et al., 2017؛ He et al.، 2021؛ Liu et al.، 2019)
د مصنوعي استخباراتو (AI) تخنیکونه، په شمول د ماشین زده کړه او ژوره زده کړه (لیاکوس او نور، 2018؛ پارسیان او نور، 2020؛ شادرین او نور.،
2019)، کمپیوټري ټیکنالوژي (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019)، لوی معلومات (Gill et al.، 2017؛ Tantalaki
et al.، 2019)، او بلاکچین (PW Khan et al.، 2020؛ Pincheira et al.، 2021).
د پورته ذکر شویو ټیکنالوژیو سربیره، د ریموټ سینسنګ یوه تخنیکي وسیله ګڼل کیږي چې د ښه کولو لپاره لوړ ظرفیت لري.
هوښیار او دقیق کرنه. سپوږمکۍ، د انسان جوړونکي الوتکې، او ډرون د ریموټ سینس کولو مشهور ټیکنالوژي دي (Tsouros et al.، 2019).
بې پیلوټه الوتکې، چې د بې پیلوټه الوتکو (UAVs) په نوم پیژندل کیږي، د بې پیلوټه الوتکو سیسټمونه (UAS)، او له لرې څخه پیل شوي الوتکې دي.
لوی اهمیت ځکه چې دوی د نورو ریموټ سینس کولو ټیکنالوژیو په پرتله ډیری ګټې لري. د مثال په توګه، ډرون کولی شي وړاندې کړي
په ورېځو ورځو کې د لوړ کیفیت او لوړ ریزولوشن عکسونه (Manfreda et al.، 2018). همدارنګه، د دوی شتون او د لیږد سرعت نور تشکیلوي
ګټې (Radoglou-Grammatikis et al.، 2020). د الوتکو په پرتله، ډرونونه خورا ارزانه دي او د تنظیم او ساتلو لپاره اسانه دي (Tsouros et al.، 2019). سره له دې چې په پیل کې په عمده توګه د نظامي اهدافو لپاره کارول کیږي، ډرون کولی شي ډیری ملکي غوښتنلیکونه ګټه واخلي، د بیلګې په توګه د اکمالاتو لړۍ مدیریت (A. Rejeb, Rejeb, et al., 2021a)، د بشردوستانه موخو لپاره (A. Rejeb, Rejeb, et al., 2021c)، هوښیار کرنه، سروې کول او نقشه کول، د کلتوري میراث اسناد، د ناورین مدیریت، او د ځنګلونو او ځنګلونو ساتنه (پانډای، پراتیهست، او نور، 2020). په کرنه کې، د ډرون ډیری غوښتنلیکونه شتون لري ځکه چې دوی د نوي ټیکنالوژیو، کمپیوټري وړتیاوو، او د کښتۍ سینسرونو سره یوځای کیدی شي ترڅو د فصل مدیریت مالتړ وکړي (د بیلګې په توګه، نقشه کول، څارنه، اوبه لګول، د نباتاتو تشخیص) (H. Huang et al., 2021) د ناورین کمول، د خبرتیا دمخه سیسټمونه، د ځنګلونو او ځنګلونو ساتنه د څو نومونو لپاره (Negash et al.، 2019). په ورته ډول، بې پیلوټه الوتکې په ډیری کرنیزو فعالیتونو کې کارول کیدی شي، پشمول د فصل او ودې څارنه، د حاصلاتو اټکل، د اوبو فشار ارزونه، او د زیان رسوونکو واښو، آفتونو او ناروغیو کشف (Inoue, 2020; Panday, Pratihast, et al., 2020). بې پیلوټه الوتکې نه یوازې د دوی د حسي معلوماتو پراساس د څارنې ، اندازې او کشف اهدافو لپاره کارول کیدی شي ، بلکه د دقیق اوبو لګولو او دقیق زیان رسوونکو واښو ، آفتونو او ناروغیو مدیریت لپاره هم کارول کیدی شي. په بل عبارت، ډرون کولی شي د چاپیریال معلوماتو پراساس په دقیق مقدار کې اوبه او آفت وژونکي سپری کړي. په کرنه کې د ډرون ګټې په 1 جدول کې لنډیز شوي.
په کرنه کې د ډرون اصلي ګټې.
| ګټه | حوالې |
| وختي او ځایي ته وده ورکړئ د حل احساس کول | (Gago et al., 2015; Niu et al., 2020; Srivastava et al.، 2020) |
| دقیق کرنې ته لاره هواره کړئ | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al.، 2017) |
| طبقه بندي او څېړنه محصولات | (Inoue, 2020; Kalischuk et al., 2019; Lopez-' Granados et al., 2016; Maimaitijiang et al.، 2017؛ میلویل او نور، 2019؛ موهرانا او دتا، ۲۰۱۶) |
| د سرې کارول | (L. Deng et al., 2018; Guan et al., 2019) |
| د وچکالۍ څارنه | (Fawcett et al.، 2020؛ پانډا، پراتیهست، او نور.، ۲۰۲۰; Su et al.، 2020) |
| د بایوماس اټکل | (Bendig et al.، 2014) |
| د حاصلاتو اټکل | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al.، 2020) |
| د ناورین کمول | (Negash et al.، 2019) |
| د وحشي ژوو ساتنه او ځنګل | (Negash et al.، 2019؛ پانډا، پراتیهست، او نور.، 2020) |
| د اوبو فشار ارزونه | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. جانګ او نور، 2019) |
| آفتونه، زیان رسونکي واښه او ناروغۍ کشف | (Gaˇsparovic'c et al., 2020; Inoue, 2020; J. Su, Liu, et al.، 2018؛ X. Zhang et al.، 2019) |
له بلې خوا، بې پیلوټه الوتکې هم د محدودیتونو سره مخ دي. د پیلوټ ښکیلتیا، د انجن ځواک، ثبات او اعتبار، د تادیاتو له امله د سینسر کیفیت
د وزن محدودیتونه، د تطبیق لګښتونه، او د الوتنې مقررات، د دوی په منځ کې دي (C. Zhang & Kovacs, 2012). موږ نیمګړتیاوې پرتله کوو
په 2 جدول کې د دریو ګرځنده ریموټ سینس کولو ټیکنالوژیو څخه. د ریموټ سینس کولو نور ټیکنالوژي لکه د خاورې سینسرونه د دې مطالعې له تمرکز څخه بهر دي.
د مختلف ګرځنده ریموټ سینس کولو ټیکنالوژیو نیمګړتیاوې.
| ریموٹ سینس کول تکنالوژي | لنډیزونه | ماخذونه |
| ډرون (UAV) | د پیلوټ ګډون؛ انځورونه کیفیت (اوسط)؛ د تطبیق لګښتونه (اوسط)؛ ثبات، چلولو، او اعتبار معیاري کول د انجن ځواک؛ محدود ځواک سرچینې (د بیټرۍ اوږدوالی)؛ د الوتنې محدوده موده، ټکر او سایبري بریدونه؛ محدود د تادیاتو وزن؛ لوی ډیټاسیټونه او د معلوماتو محدود پروسس کول وړتیاوې د مقرراتو نشتوالی؛ د تخصص نشتوالی، لوړ ننوتل ته د لاسرسي پر وړاندې خنډونه زراعتي ډرون | (Bacco et al.، 2018؛ Dawaliby et al., 2020; هارډین او هارډین، ۲۰۱۰؛ هارډین او جینسن، ۲۰۱۱؛ Lagkas et al. ۲۰۱۸; Laliberte et al.، 2018؛ Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al.، 2008؛ پوری et al., 2017; ویلسامي او نور. ۲۰۲۲; سي جانګ او کوواکس 2012) |
| د سپوږمکۍ | د وخت د سپوږمکۍ پوښښ، محدود طیف ریزولوشن؛ د لید مسلو لپاره زیان منونکي (د بیلګې په توګه، ورېځې)؛ نه شتون او د لیږد کم سرعت؛ سمت ورکول او ویینټینګ د قیمتي ځایي معلوماتو اغیزې ټولګه ورو د معلوماتو تحویل د پای کاروونکو لپاره وخت | (ابوتالیبی او نور، 2019؛ سین et al., 2019; چن او نور. ۲۰۱۹ نانسن او ایلیټ، ۲۰۱۶; پانډي، پراتهست، et al., 2020; سای وینیت et al.، 2019) |
| د الوتکو | د منلو لوړ لګښتونه؛ پیچلي تنظیم؛ د ساتنې لګښتونه؛ د باور وړ نه شتون الوتکې، د جیومیټری انځورونه غیر منظم معلومات استملاک د انعطاف نشتوالی؛ وژونکي پیښې؛ د سینسر ډاټا د کمپنونو له امله تغیرات؛ د جغرافیه کولو مسلې | (آرمسټرانګ او نور، 2011؛ Atkinson et al., 2018; Barbedo & Koenigkan, 2018; کووالیف او وروشلووا ۲۰۲۰; Suomalainen et al., ۲۰۱۳; Thamm et al.، 2013) |
په کرنه کې د څو اړخیزه او څو اړخیزه ټیکنالوژۍ په توګه، ډرونونه د بیلابیلو لیدونو څخه څیړل شوي. د مثال په توګه، پوهانو په کرنه کې د ډرون غوښتنلیکونه معاینه کړي (کولبکي ایټ ال.، 2018؛ موګیلي او دیپک، 2018)، دقیق کرنې کې د دوی ونډه (پوري او ال.، 2017؛ تسوروس او ال.، 2019)، د نورو سره د دوی بشپړتیا عصري ټیکنالوژي (الثاني او ال.، 2020؛ دوتا او میترا، 2021؛ نییر او ال.، 2020؛ ساها او نور، 2018)، او د دوی د نیویګیشن او حساس ظرفیتونو د پرمختګ امکانات (باریت ال. ، 2015؛ Suomalainen et al.، 2014). له هغه وخته چې په کرنې کې د ډرون غوښتنلیکونو په اړه څیړنه پراخه شوې (خان او نور.، 2021))، د موجوده ادبياتو لنډیز او د ډومین فکري جوړښت څرګندولو ته اړتیا ده. سربیره پردې، د دوامداره پرمختګونو سره د لوړ ټیکنالوژۍ ساحې په توګه، جوړښت شوي بیاکتنې ته اړتیا ده چې په دوره توګه د موجوده ادبياتو لنډیز او د څیړنې مهم تشې په ګوته کړي. ته
نیټه، یو څو بیاکتنې شتون لري چې د کرنې په سکتور کې د ډرون غوښتنلیکونو په اړه بحث کوي. د مثال په توګه، موګیلي او دیپک (2018) په لنډه توګه د فصل څارنې او د آفت وژونکو سپری کولو لپاره د ډرون اغیزې بیاکتنه. Inoue (2020) په کرنه کې د لیرې سینسنګ په برخه کې د سپوږمکۍ او ډرون کارولو بیاکتنه ترسره کوي. لیکوال د قضیې مطالعې او غوره تمرینونو پراساس د سمارټ فارم کولو او د سپوږمکۍ او ډرونونو ونډې اخیستو تخنیکي ننګونې لټوي. Tsouros et al. (2019) د بې پیلوټه الوتکو مختلف ډولونه او په کرهنه کې د دوی اصلي غوښتنلیکونه لنډیز کوي، د معلوماتو د ترلاسه کولو او پروسس کولو مختلف میتودونه په ګوته کوي. په دې وروستیو کې، Aslan et al. (2022) په کرهنیزو فعالیتونو کې د UAV غوښتنلیکونو پراخه بیاکتنه ترسره کړه او په شنو خونو کې د UAV لپاره په ورته وخت کې د ځایی کولو او نقشه کولو اړوند یې ټینګار وکړ. Diaz-Gonzalez et al. (2022) د مختلف ماشین زده کړې تخنیکونو او لیرې پراساس د فصل د حاصلاتو تولید وروستي مطالعات بیاکتنه
د حس کولو سیسټمونه. د دوی موندنو ښودلې چې UAVs د خاورې شاخصونو اټکل کولو لپاره ګټور دي او د سپوږمکۍ سیسټمونه د ځایي حل ، د معلوماتو لنډمهاله او انعطاف پذیري له مخې غوره کوي. Basiri et al. (2022) د دقیق کرنې په شرایطو کې د ملټي روټر UAVs لپاره د لارې پلان کولو ننګونو باندې د بریالي کولو لپاره د بیلابیلو لارو چارو او میتودونو یوه بشپړه بیاکتنه وکړه. سربیره پردې، اویس او نور. (2022) د اوبو وضعیت اټکل کولو لپاره په فصلونو کې د UAV ریموټ سینسنګ ډیټا غوښتنلیک لنډیز کړی او د فاضله فشار غوښتنلیک لپاره د UAV ریموټ سینسنګ احتمالي ظرفیت ژور ترکیب چمتو کړی. په پای کې، Aquilani et al. (2022) په څړځایونو کې د څارویو په سیسټمونو کې پلي شوي د وړاندوینې کرنې ټیکنالوژۍ بیاکتنه وکړه او دا معلومه شوه چې د UAVs لخوا فعال شوي ریموټ سینسنگ د بایوماس ارزونې او د رمو مدیریت لپاره ګټور دي.
همدارنګه، په دې وروستیو کې د څارویو د څارنې، تعقیب، او راټولولو کې د UAVs کارولو هڅې راپور شوي.
که څه هم دا بیاکتنې نوي او مهم بصیرتونه تولیدوي، د بائبلیومیتریک پر بنسټ هیڅ جامع او تازه بیاکتنه په ادبياتو کې نه موندل کیږي، چې د پوهې روښانه خلا وړاندې کوي. سربیره پردې، دا ویل شوي چې کله علمي تولید په ساینسي ډومین کې وده کوي، دا د څیړونکو لپاره حیاتي کیږي چې د ډومین د پوهې جوړښت د پوهیدو لپاره د کمیتي بیاکتنې طریقې کار کړي (Rivera & Pizam, 2015). په ورته ډول، Ferreira et al. (2014) استدلال وکړ چې لکه څنګه چې د څیړنې ساحې وده کوي او پیچلي کیږي، پوهان باید کله ناکله د نوي ونډې د څرګندولو، د څیړنې دودونو او رجحاناتو د موندلو، د څیړنې د څرنګوالي په اړه د پوهیدو لپاره، د پوهې جوړښت په ګوته کولو او د پوهاوي جوړښت ته د رسیدلو لپاره کله ناکله د تولید او راټول شوي پوهې احساس وکړي. ساحه او د څیړنې احتمالي لارښوونې. پداسې حال کې چې Raparelli او Bajocco (2019) د کرنې او ځنګلونو په برخه کې د ډرون غوښتنلیکونو د پوهې ډومین معاینه کولو لپاره د بائبلومیټریک تحلیل ترسره کړی، د دوی څیړنه یوازې د 1995 او 2017 ترمنځ خپره شوې علمي څیړنه په پام کې نیسي، کوم چې د دې ګړندۍ سیمې متحرکات نه منعکس کوي. برسېره پر دې، لیکوالانو هڅه نه ده کړې چې په ساحه کې ترټولو اغېزمنې ونډې وپیژني، د ادبیاتو کلستر کړي، او فکري جوړښت د همغږي تحلیلونو په کارولو سره ارزونه وکړي. د پایلې په توګه، دا اړینه ده چې د ادبياتو لنډیز وکړو ترڅو د اوسني څیړنې مرکزونه، رجحانات، او ګرم ځایونه ښکاره کړي.
د دې پوهې تشې ډکولو لپاره، موږ د کمیت میتودولوژي او سخت بائبلیومیټریک میتودونه کاروو ترڅو د ډرون او کرنې په تقاطع کې د څیړنې اوسنی حالت معاینه کړو. موږ استدلال کوو چې اوسنۍ څیړنه د یوې راڅرګندې شوې ټیکنالوژۍ په معاینه کولو سره چې په کرهنه کې خورا اړین دی په اوسني ادب کې ډیری مرستې کوي ځکه چې دا پدې برخه کې د ډیری اړخونو د بدلولو لپاره خورا لوی ظرفیت چمتو کوي. د کرنې په شرایطو کې د بې پیلوټه الوتکو په اړه ویشل شوي او ټوټې شوې پوهې ته په پام سره د کرهنیز ډرونونو د بائبلومیټریک تحلیل اړتیا نوره هم احساس شوې. په ورته ډول، د کرنې ډرون پورې اړوند ادبيات اړین دي چې په سیستماتیک ډول کلستر شي، د خورا اغیزمنو مطالعاتو په پام کې نیولو سره چې د دې څیړنې ساحې بنسټ جوړوي. په تحلیل کې وړتیا هم د اصلي څیړنیزو موضوعاتو روښانه کول شامل دي چې په ادبياتو کې ښودل شوي. د ټیکنالوژۍ د بدلون وړتیا په پام کې نیولو سره، موږ باور لرو چې د شبکې ژوره تحلیل د اغیزمنو کارونو په ټاکلو او د کرنې لپاره د ډرون احتمالي موضوعاتو په ډاګه کولو سره نوي بصیرت ترلاسه کوي.
له همدې امله موږ هڅه کوو چې لاندې څیړنې موخې ترلاسه کړو:
- د کرنې په برخه کې د ډرون غوښتنلیکونو کې د پام وړ ونډې سره د اغیزمنو خپرونو پیژندنه.
- د ادبياتو کلستر کول، د څیړنې مرکز پیژندنه، او د اصلي 'فکري جوړښت' مطالعاتو نقشه کول د همغږي تحلیل په کارولو سره د سیمانټیک ورته والي پراساس.
- په ساحه کې د مختلفو خپرونو ترمنځ د وخت په تیریدو سره د اړیکو او حوالې شبکې د ارتقاء پوهیدل او د راتلونکو څیړنو لارښوونو او ګرمو موضوعاتو پیژندل.
د کاغذ پاتې برخه په لاندې ډول جوړه شوې ده: برخه 2 میتودولوژي او د معلوماتو راټولولو مرحلې په ګوته کوي؛ 3 برخه د تحلیل پایلې وړاندې کوي؛ او 4 برخه د موندنو په اړه بحث کوي او د څیړنې ونډې، اغیزې، او راتلونکي لارښوونو سره پای ته رسیږي.
میتودولوژي
په دې اوسنۍ څیړنیزه څیړنه کې، موږ په زراعت کې د ډرون غوښتنلیکونو سپړلو لپاره د بایبلومیټریک تحلیل ترسره کوو. دا کمیتي طریقه د پوهې ډومین (اروا او چکرورتي، 2021) فکري جوړښت څرګندوي او اوسنی وضعیت، ګرم موضوعات، او د راتلونکي څیړنې لارښوونې چې د دې میتود په پلي کولو سره تحقیق کیدی شي (کپور او ال.، 2018؛ مشرا او ال. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020). په عموم کې، د بائبلیومیتریک تحلیل د لیکلو پټو نمونو لنډیز او ښکاره کولو او د احصایې او ریاضیاتي میتودونو پراساس د ډیسپلین ارتقاء لپاره موجود ادبيات معاینه کوي، او دا په لویو ډیټا سیټونو باندې تطبیق کیږي (پریچارډ، 1969؛ کوچنی، 1999؛ طهای او ریګسبي. ، 1998). د بائبلیومیټریک په کارولو سره، موږ هیله لرو چې د موجوده تمثیلونو او څیړنو مرکزونه ښه پوه کړو چې د ورته والي پر بنسټ په ډومین کې مرسته کوي (Thelwall, 2008). Bibliometrics نوي بصیرتونه وړاندې کوي چې د میتودولوژي د هدف کمیتي ځواک لخوا ملاتړ کیږي (Casillas & Acedo, 2007). ډیری پوهانو دمخه په اړونده ډومینونو کې د بائبلیومیټریک مطالعات ترسره کړي دي، پشمول د کرنې، ریموټ سینسنگ، او ډیجیټل بدلون (ارمینټا-میډینا او ال.، 2020؛ بوزیمبراک او ال.، 2019؛ A. Rejeb، Treiblmaier، et al.؛ Wamba2021. & Queiroz, 2021; Wang et al., 2019).
د حوالې تحلیل
د حوالې تحلیل د څیړنې په ساحه کې مختلف لیدونه څرګندوي. تر ټولو لومړی، دا د خورا اغیزمن لیکوالانو او خپرونو په ښکاره کولو کې مرسته کوي چې د څیړنې په ساحه کې مرسته کوي او د پام وړ اغیزه کوي (ګنډولف او فلسر، 2013). دوهم، د پوهې جریان او د لیکوالانو ترمنځ ارتباطي اړیکې کشف کیدی شي. په نهایت کې، د نقل شوي او نقل کولو کارونو ترمنځ د اړیکو په موندلو سره، یو څوک کولی شي د وخت په تیریدو سره د پوهې ډومین بدلونونه او تکامل وپلټي (پورنډر
et al.، 2020). د یوې خپرونې لوړ حوالې شمیرې د څیړنې ډومین کې د هغې اړونده او د پام وړ ونډې منعکس کوي (بالدي، 1998؛ ګونډلف او فلسر، 2013؛ مارینکو، 1998). د خپرونو د حوالې تحلیل هم د اړوندو کارونو په پیژندلو کې مرسته کوي او د وخت په تیریدو سره د دوی شهرت او پرمختګ تعقیبوي.
د اسنادو شریک حواله تحلیل
د همغږي کولو تحلیل یو ارزښتناکه طریقه ده چې د خپرونو ترمنځ د اړیکو پلټنه وکړي او د یوې ساحې فکري جوړښت انځور کړي (Nerur et al., 2008). په بل عبارت، د ډیرو حواله شویو خپرونو او د هغوی د اړیکو په پیژندلو سره، میتود خپرونه په جلا څیړنو کلسترونو کې ګروپ کوي چیرې چې په کلستر کې خپرونې په منظمه توګه ورته نظرونه شریکوي (میک کین، 1990؛ سمال، 1973). دا مهمه ده چې یادونه وکړو چې ورته والی پدې معنی نه دی چې د خپرونو موندنې دي
همغږي او له یو بل سره موافق؛ خپرونې د موضوع د ورته والي له امله په ورته کلستر پورې اړه لري، مګر دوی کولی شي متضاد نظرونه ولري.
د معلوماتو راټولول او تحلیل
د وایټ او ګریفیت (1981) لخوا وړاندیز شوي میتودولوژي تعقیبولو سره ، موږ د ژورنال مقالو پراخه پلټنه ترسره کړه ترڅو د کرنې په برخه کې د ډرون غوښتنلیکونو ټولې څیړنې ډومین پوښښ کړي ، لاندې پنځه مرحلې تعقیب کړي:
- لومړی ګام د معلوماتو راټولول وو. سکوپس د معیاري پایلو سره یو له خورا پراخه او باوري ډیټابیسونو څخه وټاکل شو. د کرنې په برخه کې د ټولو ډرون غوښتنلیکونو پورې اړوند خپرونو میټا ډیټا بیرته ترلاسه شوې. بیا موږ غوره شوي مقالې تحلیل کړې، له تحلیل څخه د موضوع څخه لرې مقالې لرې کول.
- موږ ادبيات تحلیل کړل او د څیړنې په ساحه کې کارول شوي خورا مهم کلیدي ټکي مو په ګوته کړل.
- د حوالې شننې په کارولو سره، موږ د لیکوالانو او اسنادو ترمنځ اړیکه وڅیړله ترڅو د اصلي حواله نمونې ښکاره کړي. موږ د کرنې ډرون په ساحه کې د پام وړ ونډې سره خورا اغیزمن لیکوالان او خپرونې هم پیژندلي.
- موږ د ورته خپرونو په کلسترونو کې د ګروپ کولو لپاره د شریک حواله تحلیل ترسره کړ.
- په نهایت کې، موږ د هیوادونو، بنسټونو او ژورنالونو ترمنځ اړیکې او اړیکې تحلیل کړې ترڅو د همکارۍ شبکه انځور کړي.
د مناسبو لټون شرایطو پیژندنه
موږ د معلوماتو د راټولولو لپاره لاندې د لټون تارونه پلي کړل: (ډرون* یا "بې پیلوټه الوتکې" یا uav* یا "د بې پیلوټه الوتکې سیسټمOR us یا "له لیرې پیل شوې الوتکې") او (کرنه یا کرهنه یا کرنه یا کروندګر). پلټنه د 2021 په سپتمبر کې ترسره شوه. ډرون ډیری ډیزاینونه لري، په شمول د UAV، UAS، او له لرې څخه پیل شوي الوتکې (Sah et al., 2021). د کرنې اړوند د لټون ځانګړي اصطلاحات د عبدالله او ال د مطالعې پراساس پیژندل شوي. (۲۰۲۱). د روڼتیا او روڼتیا لپاره، دقیقه پوښتنه چې موږ یې کارولې په 2021 ضمیمه کې ورکړل شوې. د معلوماتو پاکولو پروسې وروسته، موږ د متن فایل جوړ کړ چې وروسته بیا په BibExcel کې بار شوی، د حوالې او همغږي کولو تحلیل لپاره یو عام وسیله. دا وسیله د نورو سافټویر سره ساده تعامل هم وړاندیز کوي او د معلوماتو اداره کولو او تحلیل کې د پام وړ آزادي وړاندې کوي. د VOSviewer نسخه 1 د موندنو لیدلو او د بائبلیومیټریک شبکې رامینځته کولو لپاره کارول شوی (Eck & Waltman, 1.6.16). VOSViewer یو لړ هوښیار لید وړاندې کوي، په ځانګړې توګه د بائبلیومیټریک نقشو تحلیل لپاره (ګینګ او ال.، 2009). سربیره پردې، دا د ساده لید پایلو چمتو کولو کې مرسته کوي چې د پایلو په ښه پوهیدو کې مرسته کوي (عبدالله او ال.، 2020). د لټون تارونو پلي کول لکه څنګه چې پورته ویل شوي، موږ ټول اړونده خپرونې راټولې او زیرمه کړې. د لټون لومړنۍ پایلې ټولټال 2021 اسناد ترلاسه کړل. د ټاکل شوي نمونې کیفیت ډاډمن کولو لپاره، یوازې د ګډ بیاکتنې ژورنال مقالې په څیړنه کې په پام کې نیول شوي، په پایله کې د نورو اسنادو ډولونه لکه کتابونه، فصلونه، د کنفرانس بهیر، او اداری یادښتونه شامل دي. د سکرینینګ پروسې په جریان کې، غیر متناسب (د بیلګې په توګه، د دې کار له ساحې څخه بهر)، بې ځایه (د بیلګې په توګه، نقلونه چې د دوه ګوني شاخص څخه سرچینه اخلي)، او غیر انګلیسي ژبې خپرونې فلټر شوي. دا پروسه په وروستي تحلیل کې د 5,085 اسنادو د شاملولو پایله وه.
موندنې او بحث
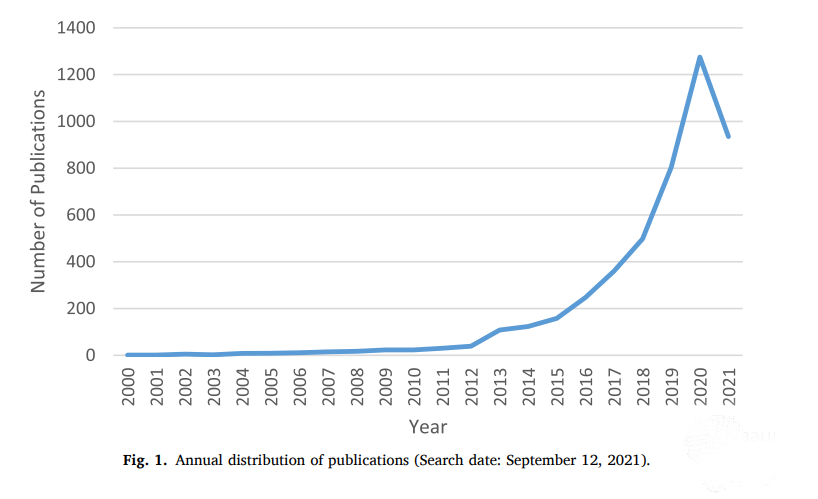
د پیل کولو لپاره، موږ د کرنې ډرون په اوسني ادب کې د خپرونو په تولید کې پرمختګونه تحلیل کړل. د علمي څیړنو لنډمهاله ویش په 1 شکل کې ښودل شوی. موږ د 2011 (30 خپرونو) څخه وروسته په خپرونو کې چټک زیاتوالی ګورو. له همدې امله، موږ پریکړه وکړه چې د تحلیل موده په دوو مختلفو مرحلو ویشو. موږ د 1990 او 2010 ترمنځ دوره د جوړونې مرحلې ته اشاره کوو، چې په کال کې شاوخوا اوه مقالې خپرې شوې. د 2010 څخه وروسته دوره د ودې مرحله بلل کیږي ځکه چې په کرنې کې د ډرون غوښتنلیکونو څیړنې پدې دوره کې د پام وړ زیاتوالی لیدلی. له 2010 وروسته، د خپرونو مخ په زیاتیدونکي شمیر د څیړونکو تر مینځ مخ په زیاتیدونکي علاقه تاییدوي، کوم چې دا هم منعکس کوي چې ډرونونه د ریموټ سینسنګ لپاره پلي شوي او په دقیق کرهنه کې کارول شوي (ډینګ او ال.، 2018؛ میس او سټیپ، 2019؛ میسینا او موډیکا، 2020 ). په ځانګړې توګه، د خپرونو شمیر په 108 کې له 2013 څخه په 498 کې 2018 ته لوړ شو او په 1,275 کې 2020 ته لوړ شو. ټول 935 مقالې د جنوري او 2021 د سپټمبر تر مینځ خپرې شوې. وروسته، موږ غوره کړه چې زموږ د ودې مرحلې ته ډیر تمرکز وکړو. ځکه چې دا دوره د کرنې ډرون خورا وروستي او مهم فرعي توضیحات منعکس کوي.
د کلیدي کلمو تحلیل
هغه کلیدي ټکي چې لیکوالان د خپرونې لپاره غوره کوي په دې باندې خورا مهم اغیزه لري چې کاغذ څنګه نمایندګي کیږي او دا څنګه په ساینسي ټولنو کې اړیکه نیول کیږي. دوی د څیړنې کلیدي موضوعات پیژني او د ودې یا ناکامیدو احتمال ټاکي (Day & Gastel, 1998. Kim et al., 2016; Uddin et al., 2015). د کلیدي کلمو تحلیل، د پراخو څیړنو رجحاناتو او لارښوونو څرګندولو لپاره یوه وسیله، په یوه ډومین کې د ټولو اړوندو خپرونو کلیدي کلمو تالیف ته اشاره کوي (دیکسټ او جاخار، 2021). په اوسنۍ څیړنه کې، موږ راټول شوي کلیدي ټکي په دوو سیټونو ویشلي دي (د بیلګې په توګه، تر 2010 او 2011-2021 پورې) ترڅو خورا مشهور موضوعات وپلټئ. د دې کولو په کولو سره، موږ کولی شو په دواړو سیټونو کې مهم کلیدي ټکي تعقیب کړو او ډاډ ترلاسه کړو چې موږ ټول اړین معلومات نیولي دي. د هرې سیټ لپاره، غوره لس کلیدي ټکي په 3 جدول کې وړاندې شوي. موږ د سمینټیک ورته کلیدي کلمو په یوځای کولو سره توپیرونه له منځه یوړل، لکه "ډرون" او "ډرون" یا په ورته ډول، "د شیانو انټرنیټ" او "IoT".
جدول 3 ښیي چې "بې پیلوټه الوتکې" په دواړو وختونو کې د "ډرون" او "بې پیلوټه هوایی سیسټم" په پرتله ډیر کارول شوي کلیدي کلمه ده. همدارنګه، "ریموټ سینسنگ"، "دقت زراعت،" او "کرنه" په دواړو دورو کې په لوړه کچه درجه بندي شوي. په لومړۍ دوره کې، "دقت زراعت" په پنځمه درجه کې و، او په دویمه دوره کې یې دویم ځای خپل کړ، کوم چې دا په ډاګه کوي چې څنګه ډرون د دقیق کرنې په ترلاسه کولو کې په زیاتیدونکي توګه مهم کیږي ځکه چې دوی کولی شي څارنه وکړي،
د کشف، او اټکل کولو تمرینونه د نورو ریموټ سینسنګ او ځمکني سیسټمونو په پرتله ګړندي، ارزانه او اسانه ترسره کوي. همدارنګه، دوی کولی شي د اړتیا په وخت کې دقیق مقدار (د مثال په توګه اوبه یا آفت وژونکي) سپرې کړي (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
د ډیری کارول شویو کلیمو لیست.
رتبو | 1990-2010 | د پیښې | 2011-2021 | د پیښې |
| 1 | بې پیلوټه الوتکې موټر | 28 | بې وسلې هوايي موټر | 1628 |
| 2 | لیرې سیسټم | 7 | دقیقه د کرنې | 489 |
| 3 | د کرنې | 4 | لیرې سیسټم | 399 |
| 4 | هوايي | 4 | بې پیلوټه | 374 |
| 5 | دقیقه د کرنې | 4 | بې وسلې هوایی سیسټم | 271 |
| 6 | بې پیلوټه الوتکې | 4 | د کرنې | 177 |
| 7 | hyperspectral سینسر | 3 | ژوره زده کړه | 151 |
| 8 | مصنوعي عصبي د شبکو | 2 | ماشین زده کړې | 149 |
| 9 | خپلواکه الوتنه | 2 | نباتات ډېرځليزې | 142 |
| 10 | قهوه | 2 | د انټرنیټ هغه شيان | 124 |
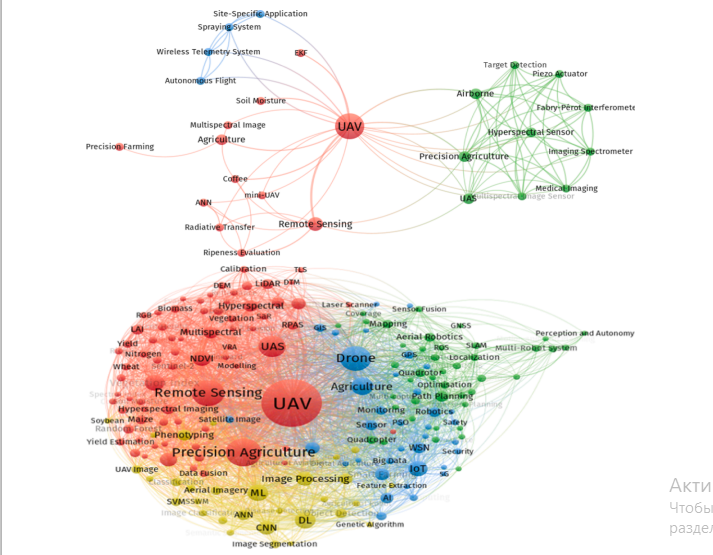
بله په زړه پورې ځانګړتیا د بشپړونکي ټیکنالوژیو شتون دی. په لومړي پړاو کې، "هایپرسپیکٹرل سینسر" او "مصنوعي عصبي شبکې" (ANN) د لسو غوره کلیمو څخه دي. Hyperspectral امیجنگ په مختلفو طول موجونو کې د لوی شمیر عکسونو راټولولو سره دودیز عکس العمل انقلاب کړی. په داسې کولو سره، سینسر کولی شي په ورته وخت کې د ملټي سپیکٹرل امیجنگ، سپیکٹروسکوپي، او RGB انځورونو (Adao ˜ et al.
2017). په لومړي پړاو کې د "ANN" شتون او په دویمه مرحله کې "ژوره زده کړه" (DL) او "ماشین زده کړه" (ML) پدې معنی ده چې ډیری خپاره شوي کارونه د ډرون لپاره د AI تخنیکونو احتمالي ازموینې باندې تمرکز کوي. پر بنسټ کرنه. که څه هم بې پیلوټه الوتکې په خپلواکه توګه د الوتنې وړتیا لري، دوی لاهم د پیلوټ ښکیلتیا ته اړتیا لري، کوم چې د وسیلې استخباراتو ټیټه کچه معنی لري. په هرصورت، دا ستونزه د AI تخنیکونو د پرمختګ له امله حل کیدی شي، کوم چې کولی شي د وضعیت ښه پوهاوی او د خپلواکې پریکړې مالتړ چمتو کړي. د AI سره سمبال شوي، ډرون کولی شي د نیویګیشن پرمهال د ټکرونو مخه ونیسي، د خاورې او فصل مدیریت ښه کړي (Inoue, 2020)، او د انسانانو لپاره کار او فشار کم کړي (BK Sharma et al., 2019).
د دوی د انعطاف او وړتیا له امله چې په پراخه کچه غیر خطي ډیټا اداره کوي ، د AI تخنیکونه د وړاندوینې او پریکړې کولو لپاره د ډرون او نورو ریموټ سینسنګ او ځمکني سیسټمونو لخوا لیږدول شوي ډیټا تحلیل کولو لپاره مناسب میتودونه دي (Ali et al., 2015; Inoue، 2020). برسېره پردې، په دویمه دوره کې د "IoT" شتون په کرنه کې د هغې راڅرګندیدونکي رول په ګوته کوي. IoT د ډرون، ML، DL، WSNs، او لوی ډیټا په شمول د نورو ټیکنالوژیو سره وصل کولو سره کرهنه کې انقلاب راولي. د IoT پلي کولو یو له مهمو ګټو څخه د دې وړتیا ده چې په نږدې ریښتیني وخت کې مختلف دندې په مؤثره او مؤثره توګه سره یوځای کړي (د معلوماتو ترلاسه کول، د معلوماتو تحلیل او پروسس کول، پریکړه کول، او پلي کول) (ایلیا او ال.، 2018؛ فینګ او ال. , 2019; Muangprathub et al., 2019). برسېره پردې، ډرون د نباتاتو د ځواک او د نباتاتو د ملکیتونو محاسبه کولو لپاره د اړینو معلوماتو د نیولو لپاره اغیزمن وسیلې ګڼل کیږي (Candiago et al., 2015). انځور 2a او 2b د دواړو وختونو لپاره د کلیدي کلمې شریک پیښو شبکې روښانه کوي.
اغېزمن لیکوالان
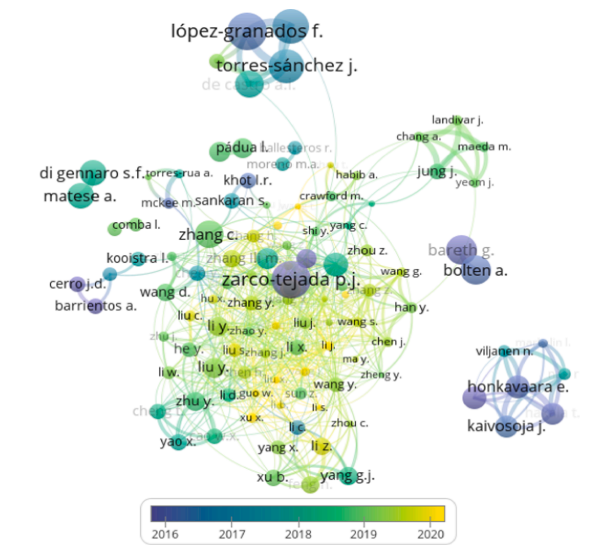
په دې برخه کې، موږ اغېزمن لیکوالان ټاکو او معاینه کوو چې د لیکوال د حوالې شبکې څنګه کولی شي اوسنی ادب لید او تنظیم کړي. انځور 3 د ټولو څیړونکو تاریخي پوښښ ښیي چې د لوړې شمیرې حوالې لري. د رنګ پیمانه د لیکوالانو د حوالې د کال په اساس توپیر منعکس کوي. موږ د څیړونکو د حوالې جوړښت معاینه کوو چې د لږترلږه 50 حوالو او لسو خپرونو د حد په کارولو سره یې د کرهنیز ډرون په اړه مطالعات خپاره کړي. بهر
12,891 لیکوالان، یوازې 115 دا شرط پوره کړی. 4 جدول د غوره لسو اغیزمنو لیکوالانو لیست کوي، د ډیرو حوالو له مخې ترتیب شوي. Lopez- Granados F. د 1,963 حوالو سره د لیست په سر کې دی، وروسته Zarco-Tejada PJ د 1,909 حوالو سره.
د ډیرو حواله شویو لیکوالانو لیست.
| لوړ پوړی | لیکوال | ژمنې |
| 1 | لوپز-ګراناډوس ´F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | توریس-S' اینچز ج. | 1,576 |
| 5 | فیریس ای | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | بولټن اې | 1,160 |
| 8 | بارت جي | 1,155 |
| 9 | برني JA | 1,132 |
| 10 | د کاسټرو AI | 1,036 |
کله چې دا انفرادي خپرونو ته راځي، د ژانګ او کوواکس (2012) مقاله په دقیق کرنې کې خپره شوې ترټولو حواله شوې مطالعه وه. دلته، لیکوالانو په دقیقه کرنه کې د UAS غوښتنلیک بیاکتنه وکړه. د دوی د څیړنې موندنې وړاندیز کوي چې د پلیټ فارم ډیزاین، تولید، د انځور جیوفرانسینګ معیاري کولو، او د معلوماتو بیرته ترلاسه کولو کاري فلو ته اړتیا ده ترڅو بزګرانو ته د باور وړ پای محصولات چمتو کړي. برسیره پردې، دوی د کروندګر سره په کلکه د ښکیلتیا وړاندیز کوي، په ځانګړې توګه د ساحې په پالن کولو، د انځور اخیستلو، او همدارنګه د معلوماتو تشریح او تحلیل کې. په مهمه توګه، دا څیړنه د لومړي ځل څخه وه چې د ساحې نقشه کولو، د ځواک نقشه کولو، د کیمیاوي موادو اندازه کولو، د نباتاتو فشار نظارت، او د نبات په وده کې د سرې اغیزې ارزونه کې د UAV اهمیت ښودلی. د ټیکنالوژۍ پورې اړوند ننګونو کې ممنوع لګښتونه، د سینسر وړتیا، د پلیټ فارم ثبات او اعتبار، د معیاري کولو نشتوالی، او د ډیټا لوی مقدار تحلیل کولو لپاره دوامداره پروسیجر شامل دي.
د حوالې تحلیل
د حوالې تحلیل د مقالو د اغیزې مطالعې استازیتوب کوي، سره له دې چې جریان لري (د بیلګې په توګه، د حوالې تعصب، د ځان حواله کول) د اغیزې ارزونې لپاره یو له معیاري وسیلو څخه ګڼل کیږي (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al.، 2010). حوالې هم د یوې ځانګړې موضوع په اړه ادبیاتو ته د کاغذونو د ونډې اهمیت او حیاتي انعکاس کوي (R. شرما او نور.، 2022). موږ د کرهنیز ډرون په اړه د خورا اغیزمنو مطالعاتو ټاکلو لپاره د حوالې تحلیل ترسره کړ او مینځپانګې یې لنډې کړې. 5 جدول د 1990-2010 او 2011-2021 کلونو لپاره د پنځلس خورا اغیزمنو کاغذونو لیست وړاندې کوي. د Berni et al لخوا مقالې. (2009)b او آسټین (2010) په ترتیب سره د 1990 او 2010 حوالو سره په ترتیب سره د 831 او 498 په جریان کې ترټولو ډیر حواله شوي. Berni et al. (2009)b د ارزانه تودوخې او تنګ بانډ ملټي سپیکٹرل امیجنگ سینسرونو سره د یو هلیکوپټر میشته UAV له لارې د کمیتي ریموټسینینګ محصولاتو رامینځته کولو احتمال روښانه کړ. د دودیز انسان شوي هوایی سینسرونو په پرتله، د کرنې لپاره د ټیټ لګښت UAV سیسټم د دې وړتیا لري چې د فصلونو د بایو فزیک پیرامیټونو پرتله کولو اټکلونه ترلاسه کړي، که غوره نه وي. ارزانه لګښت او عملیاتي انعطاف پذیري، د لوړ سپیکٹرل، ځایي، او لنډمهاله حلونو سره سره په چټک بدلون وخت کې شتون لري، د یو لړ غوښتنلیکونو لپاره مناسب UAVs وړاندې کوي چې د وخت مهم مدیریت ته اړتیا لري، پشمول د اوبو لګولو مهالویش، او دقیق کرنه. کاغذ د Berni et al. (2009)b په لوړه کچه یادونه شوې ځکه چې دا په مؤثره توګه د بې پیلوټه روټري وزر پلیټ فارم او ډیجیټل او تودوخې سینسرونه د کرهنیز غوښتنلیکونو لپاره د اړتیا وړ اندازه کولو میکانیزمونو سره مدغم کړي. دویمه ترټولو مشهوره خپرونه د آسټین (2010) لخوا لیکل شوی کتاب دی، کوم چې د UAVs د ډیزاین، پراختیا، او ځای پرځای کولو لیدونو څخه بحث کړی. په کرنه کې، UAVs د فصل د رنګ بدلونونو له لارې د ناروغیو په وخت کې کشف کولو، د کښت کرلو او سپری کولو اسانتیا، او د رمو څارنه او چلولو له لارې د فصل نظارت ملاتړ کوي.
د سلیوان او نور مطالعات. (2007)، Lumme et al. (2008)، او Gokto ¨ ǧan et al. (2010) د غوره XNUMX ډیری حواله شوي مقالو لیست بشپړ کړئ. دا مقالې د کرنې د مالتړ لپاره د UAV پر بنسټ سیسټمونو پراختیا روښانه کوي. دوی د مختلفو ستونزو حل وړاندې کوي، لکه د فصل څارنه او سکینګ، د زیان رسوونکو واښو څارنه او مدیریت، او د پریکړې ملاتړ. دوی د UAV د وړتیا په اړه هم وړاندیز او بحث کوي ترڅو د نمونې اخیستنې موثریت زیات کړي او کروندګرو سره د کره او مؤثره کولو په برخه کې مرسته وکړي.
د کښت کولو تګلارې. دوه مقالې د برني لخوا لیکل شوي (Berni et al., 2009b; Berni et al., 2009a)، د کرنې د ډرون پورې اړوند څیړنې باندې د هغه د پام وړ اغیزې په ګوته کوي. کاغذ له Zarco-Tejada et al. (2014) د مخکښو مطالعاتو څخه و چې د ونې د قد اندازه کولو کې د ټیټ لګښت UAV انځورونو کارولو اړتیا روښانه کړي.
د ډیرو حواله شویو خپرونو لیست.
| رتبو | له 1990 څخه 2010 ته | له 2011 څخه 2021 ته | ||
| سند | اقتباس | سند | اقتباس | |
| 1 | (Berni et al.، 2009b) | 831 | (سي. جانګ او کوواکس، 2012) | 967 |
| 2 | (آستین، ۲۰۱۰) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt et al.، 2010) | 331 | (فلوریانو او لرګی، 2015) | 552 |
| 4 | (SR Herwitz et al., 2004) | 285 | (حسین موتلغ او نور، 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (شخاتره او نور، 2019) | 383 |
| 6 | (Berni et al.، 2009b) | 250 | (Ma et al.، 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al.، 2014) | 360 |
| 8 | (Hrabar et al.، 2005) | 175 | (زرکو-تیجادا او نور، 2014) | 347 |
| 9 | (Y. Huang et al.، 2009) | 129 | (اعلان ao et al.، 2017) | 335 |
| 10 | (Schmale III et al. 2008) | 119 | (Honkavaara et al. 2013A) | 331 |
| 11 | (عبدالرحمن او نور، 2005) | 79 | (Candiago et al.، 2015) | 327 |
| 12 | (Techy et al.، 2010) | 69 | (ژیانګ او تیان، 2011) | 307 |
| 13 | (Sullivan et al.، 2007) | 51 | (Matese et al.، 2015) | 303 |
| 14 | (Lumme et al.، 2008) | 42 | (Gago et al.، 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al.، 2010) | 40 | (Aasen et al.، 2015a) | 269 |
په دویمه دوره کې (2011-2021)، د Zhang and Kovacs (2012) او Nex and Remondino (2014) لخوا څیړنې په پایله کې د ډیری تکراري خپرونو پایله وه. Zhang and Kovacs (2012) استدلال کوي چې دقیق کرهنه کولی شي د جیوسپیټل تخنیکونو او سینسرونو پلي کولو څخه ګټه پورته کړي، لکه د جغرافیایي معلوماتو سیسټمونه، GPS، او ریموټ سینسنگ، په ساحه کې بدلونونه ونیسي او د بدیل ستراتیژیو په کارولو سره یې اداره کړي. په دقیقه کرنه کې د لوبې بدلونکي په توګه، د بې پیلوټه الوتکو کارول د ریموټ سینسنگ، د هوایی مشاهدو ساده کولو، د فصل د ودې ډاټا، د خاورې شرایطو، او د سپری کولو ساحو کې د نوي عمر نښه کړې. د Zhang and Kovacs (2012) بیاکتنه خورا مهمه ده ځکه چې دا د چاپیریال څارنې او دقیق کرنې کې د دې وسیلو د موجوده کارونې او ننګونو په څرګندولو سره د UAVs بصیرت وړاندې کوي ، لکه د پلیټ فارم او کیمرې محدودیتونه ، د معلوماتو پروسس کولو ننګونې ، د بزګر بوختیا ، او د هوایی چلند مقررات. . دوهم
د Nex and Remondino (2014) څخه ډیری حواله شوي مطالعې د ځمکې د عکسونو اخیستلو، پروسس کولو او تحلیل لپاره د UAVs هنر حالت بیاکتنه کړې.
د دوی کار د ډیری UAV پلیټ فارمونو ، غوښتنلیکونو ، او کارولو قضیو عمومي کتنه هم وړاندې کړه ، د UAV عکس پروسس کولو کې نوي پرمختګونه ښیې. په کرنه کې، بزګران کولی شي د UAVs څخه کار واخلي ترڅو د لګښت او وخت سپمولو لپاره اغیزمنې پریکړې وکړي، د زیانونو چټک او دقیق ریکارډ ترلاسه کړي، او د احتمالي ستونزو اټکل وکړي. د دودیز هوایی پلیټ فارمونو برعکس ، UAVs کولی شي عملیاتي لګښتونه کم کړي او په سختو ځایونو کې د لاسرسي خطر کم کړي پداسې حال کې چې لاهم د لوړ دقیق ظرفیت ساتي. د دوی مقاله د UAVs بیلابیل ګټې لنډیز کوي ، په ځانګړي توګه د دقت او حل له مخې.
د 2011 او 2021 تر منځ د پاتې دیارلس خورا معتبر خپرونو په مینځ کې، موږ د امیجنگ ماموریتونو کې د ډرون غوښتنلیکونو پورې تړلې څیړنې باندې ډیر تمرکز لیدلی (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014) , دقیق کرنه (Candiago et al., 2015; Honkavaara et al., 2013a)، دقیق ویټیکچر (Matese et al.، 2015)، د اوبو فشار ارزونه (Gago et al.، 2015)، او د نباتاتو څارنه (Aseen) ، 2015a). په لومړیو کلونو کې، څیړونکو تمرکز وکړ
د کرنې لپاره د ټیټ لګښت، لږ وزن، او دقیق UAV پر بنسټ سیسټمونو پراختیا باندې نور ډیر څه؛ نور وروستي څیړنې د کرنې او ساحې سروې کولو لپاره د UAV غوښتنلیکونو بیاکتنې باندې ډیر تمرکز کړی. په لنډیز کې، دا تحلیل څرګندوي چې اغیزمنو خپرونو د UAVs اوسني ساینسي او ټیکنالوژیک حالت ارزولو لپاره د مخکینیو مطالعاتو بیاکتنې چمتو کړي او د دقیق کرنې مالتړ لپاره د UAV سیسټمونه رامینځته کړي. په زړه پورې خبره دا ده چې موږ داسې مطالعې ونه موندلې چې تجربه کار کوي
ميتودولوژي يا تشريحاتي قضيې مطالعات، چې د پوهې د پام وړ تشه جوړوي او په دې موضوع د لا زياتو څيړنو غوښتنه کوي.
همغږي تحلیل
د Gmür (2006) په وینا، د همغږي کولو تحلیل ورته خپرونې پیژني او کلسترونه یې کوي. د کلستر په احتیاط سره معاینه کولی شي د خپرونو ترمنځ د څیړنې یوه ګډه ساحه ښکاره کړي. موږ د کرنې ډرون پورې اړوند د ادبیاتو همغږي څیړنه کوو ترڅو د اړونده موضوع ساحې روښانه کړي او د خپرونو فکري نمونې کشف کړي. په دې اړه، سمال (1973) د خورا اغیزناک او سمال څیړنې مطالعې لپاره د کویتیشن تحلیل کارولو وړاندیز وکړ.
د نظم دننه. د دې لپاره چې سیټ تر ټولو اصلي مقالو پورې محدود کړي (ګویل او کمار، 2021)، موږ د 25 د شریک حوالې حد ټاکلی، پدې معنی چې دوه مقالې باید د 25 یا ډیرو مختلفو خپرونو د حوالې لیست کې یوځای حواله شوي وي. کلسترینګ هم د لږ تر لږه کلستر اندازه 1 سره ترسره شوی او پرته له کوم میتود څخه چې کوچني کلسترونه د لویو سره یوځای کړي. د پایلې په توګه، شپږ کلسترونه د مطالعې د ورته والي او د دوی فکري جوړښت پر بنسټ رامینځته شوي. 6 جدول په هر کلستر کې د خپرونو ویش ښیي.
1 کلستر: دا کلستر اتلس اسناد لري چې وروسته یې خپاره کړل پدې کلستر کې خپرونه د چاپیریال څارنې، د فصلونو مدیریت، او زیان رسوونکو واښو مدیریت کې د ډرون رول په اړه بحث کوي. د مثال په توګه، Manfreda et al. (2018) د طبیعي کرهنیز ایکوسیستم نظارت کې د UAV اوسني څیړنې او پلي کولو یوه عمومي کتنه وړاندې کوي او استدلال کوي چې ټیکنالوژي د چاپیریال نظارت او کمولو لپاره خورا لوی ظرفیت وړاندې کوي.
د ساحې د څارنې او دودیز هوا او د فضا څخه پیدا شوي ریموټ سینسنګ ترمنځ موجود واټن. دا په ارزانه توګه په لویو ساحو کې د لنډمهاله بیرته ترلاسه کولو او ځایي لیدونو لپاره د نوي ظرفیت وړاندیز کولو سره ترسره کیدی شي. UAVs کولی شي په دوامداره توګه چاپیریال احساس کړي او پایله شوي ډاټا هوښیار ، مرکزي / غیر متمرکز ادارو ته واستوي چې سینسر کنټرولوي ترڅو د پیښې ستونزې وپیژني ، لکه د ناروغۍ نشتوالی یا د اوبو کشف (Padua et al., 2017). Adao ˜ et al. (2017) دا په ډاګه کړه چې UAVs د اوبو د وضعیت، د بایوماس اندازې، او د ځواک ارزونې پورې اړوند د خامو معلوماتو پراخه مقدار په نیولو سره د نباتاتو د شرایطو ارزولو لپاره غوره دي. د UAV نصب شوي سینسرونه هم په سمدستي ډول په مناسب چاپیریال شرایطو کې ځای په ځای کیدی شي ترڅو د ریموټ سینسنګ ډیټا په وخت نیول کیدو ته اجازه ورکړي (Von Bueren et al., 2015). د UAVs په ذریعه، بزګران کولی شي د کور دننه کرهنیز فعالیتونه ترسره کړي د کور دننه کرهنیز چاپیریال (د بیلګې په توګه، شنو خونو) کې له هر ځای څخه د اندازه کولو له لارې اندازه کول، په دې توګه د محلي اقلیم کنټرول او د نباتاتو څارنه یقیني کوي (Roldan et al. .، 2015). د دقیقیت په شرایطو کې
د کرنې، فصلونو مدیریت پریکړې د مناسب وختي او ځایي حل سره د کره او باوري فصل معلوماتو ته اړتیا لري (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). د دې دلیل لپاره، Agüera Vega et al. (2015) د ودې فصل په جریان کې د لمر ګل د فصل عکسونو ترلاسه کولو لپاره د UAV په نصب شوي ملټي سپیکٹرل سینسر سیسټم کارولی. په ورته ډول، Huang et al. (2009) په یاد ولرئ چې د UAVs پراساس ریموټ سینسنګ کولی شي د راټول شوي سپیکٹرل ډیټا څخه د فصلونو او خاورې اندازه کول اسانه کړي. Verger et al. (2014) د کرنې په دقیق غوښتنلیکونو کې د UAV انعکاس اندازه کولو څخه د شنو ساحو شاخص (GAI) اټکل کولو تخنیک رامینځته کړی او ازموینه یې کړې چې د غنمو او ریپسیډ فصلونو تمرکز کوي. له همدې امله، ډرون د بار بار بیاکتنې او لوړ ځایي حل سره د فصل حالت معلوماتو بیرته ترلاسه کولو لپاره نوي امکانات چمتو کوي (ډونګ ایټ ال.
د کرهنیز ډرون په اړه د اغیزمنو خپرونو کلستر کول.
| کلستر | پراخه موضوع | ماخذونه |
| 1 | د چاپیریال څارنه، فصل مدیریت، د زیان رسوونکو واښو مدیریت | (اعلان ao et al., 2017; Agüera Vega et al.، 2015؛ de Castro et al., 2018; Gomez-Cand ´ on ´et al., 2014; YB Huang et al.، 2013؛ خانال او نور ۲۰۱۷; لوپز-ګراناډوس، ۲۰۱۱؛ Manfreda et al., 2018; پی' adua et al., ۲۰۱۷; Pena ˜ et al.، 2017; پیریز-اورتیز et al.، 2015؛ Rasmussen et al.، 2013، ۲۰۱۶; توریس-S' anchez et al.، 2014؛ توریس سانچیز، لوپیز ګرانادوس، او پینا، ˜ 2015; Verger et al.، 2014؛ وون Bueren et al., 2015; ج. جانګ او کوواکس، ۲۰۱۲) |
| 2 | ریموټ فینوټایپینګ، حاصل اټکل، د فصل سطحه ماډل، د نباتاتو شمیرل | (Bendig et al.، 2013، 2014؛ Geipel et al.، 2014؛ ګناډینګر ¨ & Schmidhalter, 2017; هغیغتالاب et al.، 2016; Holman et al., 2016; جين et al., 2017; W. Li et al.، 2016; Maimaitijiang et al.، 2017؛ سنکران et al.، 2015؛ Schirrmann et al., 2016; شی او نور، 2016؛ یو او نور، 2017؛ ایکس. Zhou et al.، 2017) |
| 3 | د اوبو لپاره حرارتي عکس اخیستل، ملټي سپیکٹرل امیجنگ | (Baluja et al.، 2012؛ Berni et al.، 2009b; Berni et al.، 2009a ; کینډیګو et al.، 2015؛ Gago et al., 2015; Gonzalez-Dugo et al., 2013, 2014; ګرینزډورف ¨ et al.، 2008; خليق et al., 2019; Matese et al.، 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al. 2013) |
| 4 | Hypersectral امیجنگ، سپیکٹرل امیجنگ | (Aasen et al.، 2015a؛ Bareth et al.، 2015; Hakala et al.، 2013؛ Honkavaara et al.، 2013a; لوسییر et al.، 2014؛ Saari et al.، 2011; Suomalainen et al.، 2014) |
| 5 | د 3D نقشه کولو غوښتنلیکونه | (Jim'enez-Brenes et al.، 2017؛ Nex & Remondino, 2014; سلامي او نور. ۲۰۱۶; توریس-S' اینچز، لوپیز-' Granados, Serrano, et al., 2015; زاهوي او نور، 2015؛ زرکو-تیجاده et al.، 2014) |
| 6 | د کرنې څارنه | (SR Herwitz et al.، 2004؛ Hunt et al.، 2010؛ CCD Lelong et al. ۲۰۰۸; Primicerio et al.، 2008; ژیانګ او تیان، ۲۰۱۱) |
سربیره پردې، ډرون د کرنې په برخه کې د ننګونو دندو لپاره ګټور دي، په شمول د زیان رسوونکو واښو نقشه. د وسیلو لخوا اخیستل شوي عکسونه په کروندو کې د زیان رسوونکو واښو د لومړني کشف لپاره د دوی ګټورتوب ثابت کړی (de Castro et al., 2018; Jim'enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ' et al., 2016؛ Rozenberg et al.، 2021). په دې اړه، de Castro et al. (2018) دا په ګوته کوي چې د UAV عکس العمل او د آبجیکٹ پراساس عکس تحلیل (OBIA) یوځای کیدو متخصصینو ته دا توان ورکړی چې د فصل په لومړیو فصلونو کې د لومړني کشف اتومات کولو مسله له مینځه ویسي ، کوم چې د زیان رسوونکو واښو په څیړنه کې یو لوی ګام دی. په ورته ډول، Pena ˜ et al. (2013) په ګوته کوي چې د OBIA طرزالعمل سره په ګډه د UAV څخه د خورا لوړ ځایي ریزولوشن عکسونو کارول دا امکان رامینځته کوي چې د جوارو په لومړیو فصلونو کې د زیان رسوونکو واښو نقشې رامینځته کړي چې د فصل په جریان کې د زیان رسوونکو واښو کنټرول اقداماتو پلي کولو پلان کولو کې کارول کیدی شي ، د سپوږمکۍ او دودیز هوایی عکسونو له وړتیا څخه بهر دنده. د انځور طبقه بندي یا د شیانو کشف الګوریتمونو په پرتله، د سیمانټیک قطع کولو تخنیکونه د زیان رسوونکو واښو نقشه کولو کارونو کې ډیر اغیزمن دي (J. Deng et al., 2020)، پدې توګه بزګرانو ته وړتیا ورکوي چې د ساحې شرایط کشف کړي، زیانونه کم کړي، او د ودې په موسم کې حاصلات ښه کړي (رمیش) et al.، 2020). د ژورې زده کړې پر بنسټ سیمانټیک قطع کول هم کولی شي د لوړ ریزولوشن هوایی عکسونو څخه د نباتاتو پوښ دقیق اندازه چمتو کړي (رمیش او نور.، 2020؛ A. ژینګ او ال.، 2022). د ریموټ لپاره د دوی احتمال سره سره
د پیکسل طبقه بندي احساس کول، د سیمانټیک قطع کولو تخنیکونه د پام وړ محاسبې او د ممنوع لوړ GPU حافظې ته اړتیا لري (J. Deng et al., 2020).
د ماشین زده کړې او UAV پر بنسټ، P´erez-Ortiz et al. (2015) د زیان رسوونکو واښو نقشه کولو طریقه وړاندیز کړه ترڅو د ساحې ځانګړي زیان رسوونکو واښو کنټرول ستراتیژۍ چمتو کړي کله چې کروندګر د پیل څخه وروسته د زیان رسوونکو واښو کنټرول غوره کړي. په پای کې، Rasmussen et al. (2013) روښانه کړه چې ډرون د لوی ځایي حل انعطاف سره ارزانه سینسنګ چمتو کوي. په ټولیز ډول، په دې کلستر کې خپرونې د UAVs د امکاناتو په سپړلو تمرکز کوي ترڅو د ریموټ سینسنګ، د فصل څارنه، او د زیان رسوونکو واښو نقشه مالتړ وکړي. اضافي ژورې څیړنې ته اړتیا ده ترڅو نور تحقیق وکړي چې څنګه د چاپیریال څارنې، فصلونو مدیریت، او د زیان رسوونکو واښو نقشه کولو کې د ډرون غوښتنلیکونه کولی شي ډیر دوامدار کرهنه ترلاسه کړي (چاموه او سنګ، 2019؛ اسلام ایټ ال.، 2021؛ Popescu et al.، 2020؛ J Su, Liu, et al., 2018) او د فصل بیمې غوښتنلیکونو کې د دې ټیکنالوژۍ د حکومتدارۍ مسلې په ګوته کوي (باسنټ او بنګ، 2018؛ چاموه او سنګ، 2019، 2022؛ مینین او رابینسن، 2021). څیړونکي باید د پروسس شوي ډیټا وروستي کیفیت لوړولو لپاره د اغیزمن پروسس کولو تخنیکونو سره د UAV راټول شوي اندازه کولو تصدیق کولو باندې تمرکز وکړي (Manfreda et al.، 2018). برسېره پردې، د مناسبو الګوریتمونو پراختیا چې هغه پکسلونه پیژني چې په ډیجیټل عکسونو کې زیان رسونکي توکي ښکاره کوي او د UAV زیان رسوونکو واښو نقشه کولو په جریان کې غیر مناسب شالید له مینځه وړي (Gaˇsparovi'c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020؛ لوپز- ´ Granados et al., 2016). د نباتاتو په پیژندنه، د پاڼو طبقه بندي، او د ناروغیو نقشه کولو کې د سیمانټیک قطع کولو تخنیکونو د پلي کولو په اړه اضافي څیړنې ښه راغلاست دي (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
کلستر 2. په دې کلستر کې خپرونې د کرنیزو بې پیلوټه الوتکو په څو اړخونو تمرکز کوي. د ریموټ فینوټایپینګ پورې اړوند، سنکران او نور. (2015) په ساحه کې د فصلونو ګړندي فینوټایپ کولو لپاره د UAVs سره د ټیټ لوړوالي ، لوړ ریزولوشن هوایی عکس العمل کارولو احتمال بیاکتنه وکړه ، او دوی استدلال کوي چې د ځمکې پراساس سینس کولو پلیټ فارمونو په پرتله ، کوچني UAVs د کافي سینسرونو سره ډیری ګټې وړاندې کوي. لکه ساحې ته اسانه لاسرسی، د لوړ ریزولوشن ډیټا، د معلوماتو اغیزمنه راټولول،
د ساحې د ودې شرایطو چټکه ارزونه، او ټیټ عملیاتي لګښتونه. په هرصورت، لیکوالان دا هم یادونه کوي چې د ساحې فینوټایپینګ لپاره د UAV اغیزمن غوښتنلیک په دوه بنسټیزو عناصرو تکیه کوي، د بیلګې په توګه، د UAV ځانګړتیاوې (د بیلګې په توګه، خوندیتوب، ثبات، موقعیت، خودمختاری) او د سینسر ځانګړتیاوې (د بیلګې په توګه، حل، وزن، طیف طول موج، ساحه له نظره). هغیغتالاب او نور. (2016) د نیمه اتوماتیک عکس پروسس کولو پایپ لاین وړاندیز کړی ترڅو د UAV عکس العمل څخه د پلاټ کچې ډیټا بیرته ترلاسه کړي او د نسل ورکولو پروسه ګړندۍ کړي. Holman et al. (2016) لوړه وده کړې
د ټریپټ فیلډ فینوټایپینګ سیسټم او روښانه یې کړه چې UAV د کیفیت ، پراخه ، ساحې پراساس فینوټایپیک ډیټا راټولولو توان لري ، او دا چې وسیله د لویو ساحو او مختلف ساحوي ځایونو لپاره مؤثره ده.
لکه څنګه چې د حاصلاتو اټکل د معلوماتو خورا خورا مهم برخه ده، په ځانګړې توګه کله چې په وخت کې شتون ولري، د UAVs لپاره احتمال شتون لري چې ټول ساحې اندازه کړي او په اغیزمنه توګه د لوړ کیفیت ډاټا ترلاسه کړي (Daakir et al., 2017; Demir et al., 2018 ؛ Enciso et al.، 2019؛ Kulbacki et al.، 2018؛ Pudelko et al.، 2012). په دې اړه، Jin et al. (2017) په خورا ټیټ ارتفاع کې د UAVs لخوا ترلاسه شوي د لوړ ریزولوشن عکس العمل څخه ګټه پورته کړه ترڅو د راڅرګندیدو په مرحله کې د غنمو د نبات د کثافت اټکل کولو میتود رامینځته او ارزونه وکړي. د لیکوالانو په وینا، UAVs د روور سیسټمونو محدودیتونه له منځه وړي چې په کیمرونو سمبال دي او په فصلونو کې د نبات د کثافت اټکل کولو لپاره د غیر انتفاعي میتود استازیتوب کوي، کروندګرو ته اجازه ورکوي چې د خاورې د ټرافیکي وړتیا څخه خپلواکه د ساحې فینوټایپینګ لپاره اړین لوړ تولید ترلاسه کړي. Li et al. (2016) په سلګونو سټیریو عکسونه د خورا لوړ ریزولوشن سره د UAV-based سیسټم په کارولو سره د جوار پیرامیټرونو اټکل کولو لپاره راټول کړي ، پشمول د کینوپی لوړوالی او د ځمکې څخه پورته بایوماس. په پای کې، Yue et al. (2017) وموندله چې د UAVs څخه ټاکل شوي د فصل لوړوالی کولی شي د ځمکې لاندې بایوماس (AGB) اندازې ته وده ورکړي.
د فصل د ودې د څارنې یوه تګلاره د فصل د سطحې د ماډلونو د جوړولو مفکوره ده (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). ډیری مطالعاتو د UAV څخه اخیستل شوي عکسونو امکانات په ګوته کړي ترڅو د بوټو لوړوالی ونیسي او د دوی وده وڅاري. د مثال په توګه، Bendig et al. (2013) د UAV په کارولو سره له 0.05 متر څخه کم خورا لوړ ریزولوشن سره د څو لنډمهاله فصلونو سطحې ماډلونو پراختیا تشریح کړه. دوی موخه دا وه چې فصل کشف کړي
د ودې بدلون او د فصل په درملنه، کښت او فشار باندې د هغې انحصار. Bendig et al. (2014) UAVs کارولي ترڅو تازه او وچ بایوماس د نبات د لوړوالي پراساس اټکل کړي چې د نبات د سطحې ماډلونو څخه استخراج شوي او موندلي چې د هوایی پلیټ فارمونو او ځمکې لیزر سکیننګ برعکس، د UAVs څخه د لوړ ریزولوشن عکسونه کولی شي د مختلف ودې لپاره د نبات د لوړوالي ماډلینګ دقت د پام وړ زیات کړي. پړاوونه په ورته رګ کې، Geipel et al. (2014) د عکس العمل ترلاسه کولو لپاره د دوی په څیړنه کې UAVs کارولي
د جوارو د غنمو د حاصلاتو وړاندوینې لپاره ډیټاسیټونه د فصل له پیل څخه تر نیمایي پورې د ودې په دریو مختلف مرحلو کې او دې پایلې ته ورسیدل چې د هوایی عکسونو او د فصل سطحې ماډلونو پراساس د طیف او ځایي ماډلینګ ترکیب د مینځ فصل د جوارو حاصلاتو وړاندوینې لپاره مناسب میتود دی. په پای کې، Gnadinger ¨ او Schmidhalter (2017) په دقیق فینوټایپنګ کې د UAV کارول معاینه کړل او روښانه یې کړه چې د دې ټیکنالوژۍ کارول کولی شي د فارم مدیریت ته وده ورکړي او د نسل او زراعتي موخو لپاره د ساحې تجربې وړ کړي. په ټولیز ډول، موږ ګورو چې په 2 کلستر کې خپرونې په لیرې پرتو کې د UAVs اصلي ګټو باندې تمرکز کوي
فینوټایپنګ، د حاصلاتو اټکل، د فصل سطحه موډل کول، او د نباتاتو شمیرل. راتلونکي مطالعات کولی شي د ریموټ فینوټایپینګ لپاره د نویو میتودونو په رامینځته کولو سره ژور کیندنه وکړي کوم چې کولی شي د لیرې احساس شوي ډیټا پروسس اتومات او اصلاح کړي (باراباسچي او نور.، 2016؛ لیبیسچ او ال. .، 2015). برسېره پردې، د IoT سینسرونو فعالیت چې په UAVs کې نصب شوي او د دوی د لګښتونو، کارګرانو، او د حاصلاتو د اندازې دقیقیت ترمنځ د سوداګرۍ بندول باید په دې کې څیړنه وشي.
راتلونکی (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). په نهایت کې ، د عکس پروسس کولو مؤثره میتودونو رامینځته کولو ته اړتیا شتون لري چې وکولی شي د باور وړ معلومات رامینځته کړي ، په زراعتي تولید کې موثریت اعظمي کړي ، او د کروندګرو د لاسي شمیرنې کار کم کړي (RU Khan et al., 2021; Koh et al., 2021; Lin & Guo، 2020؛ C. Zhang et al.، 2020).
کلستر 3. په دې کلستر کې خپرونې د UAV پلیټ فارمونو کې کارول شوي د کرنې سرچینو د لیرې حس کولو لپاره د عکس اخیستنې سیسټمونو مختلف ډولونو په اړه بحث کوي. په دې برخه کې، د تودوخې عکس العمل د سطحې د تودوخې څارنه ته اجازه ورکوي ترڅو د حاصلاتو د زیان مخه ونیسي او د وچکالۍ فشار ژر کشف کړي (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017؛ یوم، 2021). Baluja et al. (2012) ټینګار وکړ چې په الوتکه کې د ملټي سپیکٹرل او تودوخې کیمرونو کارول
UAV څیړونکو ته وړتیا ورکړه چې د لوړ ریزولوشن عکسونه ترلاسه کړي او د تاک اوبو وضعیت ارزونه وکړي. دا کیدی شي د لیرې سینسنګ ډیټا په کارولو سره د نوي اوبو مهالویش ماډلونو رامینځته کولو لپاره ګټور وي (Baluja et al., 2012). له امله
د UAVs محدود بار ظرفیت، Ribeiro-Gomes et al. (2017) په نباتاتو کې د اوبو فشار معلومولو لپاره په UAVS کې د غیر یخ شوي حرارتي کیمرونو ادغام په پام کې نیولی ، کوم چې دا ډول UAVs د دودیز سپوږمکۍ میشته ریموټ سینسنګ او UAVs په پرتله ډیر اغیزمن او د کار وړ ګرځوي چې د یخ حرارتي کیمرونو سره مجهز دي. د لیکوالانو په وینا، نه یخ شوي حرارتي کیمرې د یخ شوي کیمرې په پرتله سپکې دي، چې مناسب کیلیبریشن ته اړتیا لري. Gonzalez-Dugo et al. (2014) وښودله چې حرارتي عکس العمل په مؤثره توګه د فصل د اوبو فشار شاخصونو ځایي نقشې رامینځته کوي ترڅو د اوبو وضعیت ارزونه وکړي او د لیمو باغونو دننه او دننه د اوبو فشار اندازه کړي. Gonzalez-Dugo et al. (2013) او Santesteban et al. (2017) د لوړ ریزولوشن UAV تودوخې عکس العمل کارول تحقیق کړي ترڅو د سوداګریز باغ او انګورو د اوبو حالت تغیر اټکل کړي.
ملټيسپټرل امیجنگ کولی شي د دودیز RGB (سور ، شنه او نیلي) عکسونو (Ad˜ ao et al., 2017; Navia et al., 2016) په پرتله لوی معلومات چمتو کړي. دا سپیکٹرل ډاټا، د ځایي معلوماتو سره، کولی شي په طبقه بندي، نقشه کولو، وړاندوینې، وړاندوینې، او کشف کولو موخو کې مرسته وکړي (Berni et al., 2009b). د Candiago et al په وینا. (2015)، د UAV پر بنسټ څو اړخیزه امیجنگ کولی شي د کرنې ارزونې او دقیق کرنې کې د باور وړ او اغیزمن سرچینې په توګه په پراخه کچه مرسته وکړي. همدارنګه،
خلیق او نور. (2019) د سپوږمکۍ او UAV میشته ملټي سپیکٹرل امیجنگ ترمینځ پرتله کول. د UAV پر بنسټ عکسونه د دې لامل شوي چې د انګورو د تغیراتو په بیانولو کې ډیر دقیق وي او همدارنګه د فصلونو د نمایندګۍ لپاره قوي نقشې. په لنډه توګه، په دې کلستر کې مقالې په زراعتي UAVs کې د تودوخې او څو اړخیز امیجنگ سینسرونو شاملولو په اړه بحث کوي. په دې اساس، لا زیاتو څیړنو ته اړتیا ده ترڅو پوه شي چې څنګه حرارتي او څو اړخیزه امیجنگ د AI سره مدغم کیدی شي
تخنیکونه (د بیلګې په توګه، ژوره زده کړه) د نبات فشار معلومولو لپاره (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). دا ډول بصیرت به د لا اغیزمن او دقیق کشف او همدارنګه د نبات وده، فشار، او فینولوژي څارنه کې مرسته وکړي (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., ۲۰۲۰).
کلستر 4. دا کلستر اوه کاغذونه لري چې د کرنې د کړنو په مالتړ کې د سپیکٹرل امیجنګ او هایپرسپیکٹرل امیجنگ مهم رول په شاوخوا کې ګرځي. Hyperspectral امیجنگ ځان د ریموټ سینسنګ میتود په توګه رامینځته کړی چې د ځمکې د سیسټم کمیتي ارزونې وړتیا ورکوي (Schaepman et al., 2009) . د دې لپاره چې ډیر دقیق وي، دا د سطحې موادو پیژندنه، د (نسباتي) غلظت اندازه کول، او د سطحي اجزاو تناسب ټاکل
په مخلوط پکسلز کې (Kirsch et al.، 2018؛ Zhao et al.، 2022). په بل عبارت، د هایپرسپیکٹرل سیسټمونو لخوا چمتو شوي لوړ سپیکٹرل ریزولوشن د مختلف پیرامیټونو ډیر درست اټکلونه وړوي، لکه د سبزیجاتو ملکیت یا د پاڼو د اوبو محتوا (Suomalainen et al., 2014). په دې کلستر کې څیړونکو د دې ډول سیسټمونو مختلف اړخونه څیړلي. د نورو په منځ کې، Aasen et al. (2015b) د سپک وزن څخه د درې اړخیز هایپرسپیکٹرل معلوماتو ترلاسه کولو لپاره یوه ځانګړې تګلاره وړاندې کړه
سنیپ شاټ کیمرې په UAVs کې د نباتاتو څارنې لپاره کارول کیږي. Lucieer et al. (2014) د نوي هایپرسپیکٹرل UAS ډیزاین، پراختیا، او هوايي عملیاتو په اړه بحث وکړ او همدارنګه د دې سره راټول شوي د انځور ډیټا اندازه کول، تحلیل، او تفسیر. په پای کې، Honkavaara et al. (2013b) د FabryPerot انټرفیرومیټر پراساس د سپیکٹرل عکسونو لپاره د پروسس کولو پراخه طریقه رامینځته کړې او د دقیق کرنې لپاره د بایوماس اندازې طرزالعمل کې یې کارول ښودلي. د دې اوسني کلستر لپاره احتمالي راتلونکي لارې د سینسر ټیکنالوژیو کې د تخنیکي پرمختګونو په اړتیا ټینګار کول شامل دي (Aasen et al., 2015b) او همدارنګه د تکمیلي ټیکنالوژیو شاملولو او وده کولو اړتیا په ځانګړي توګه لوی ډیټا او تحلیلونه (Ang & Seng, 2021; 2020b) - گراماتیکیز او نور، 2019؛ شکور او نور، 2020). وروستنۍ په عمده توګه د تل وده کونکي ډیټا څخه رامینځته کیږي چې د مختلف سینسرونو لخوا رامینځته شوي چې په سمارټ زراعت کې پلي شوي (C. Li & Niu, 2022; A. Rejeb et al., 2021; Y. Su & Wang, XNUMX).
کلستر 5. په دې کلستر کې خپرونو د ډرون پر بنسټ د 3Dmapping غوښتنلیکونه معاینه کړي. د 3D نقشه کولو لپاره د ډرون کارول کولی شي پیچلي ساحوي کار کم کړي او د پام وړ موثریت زیات کړي (Torres-Sanchez et al., 2015). په کلستر کې پنځه مقالې په عمده توګه د نباتاتو د څارنې غوښتنلیکونو باندې تمرکز کوي. د مثال په توګه، د کینوپی ساحې، د ونې لوړوالی، او د تاج حجم په اړه د درې اړخیزو معلوماتو ترلاسه کولو لپاره، Torres-Sanchez ' et al. (2015) د ډیجیټل سطحې ماډلونو رامینځته کولو لپاره د UAV ټیکنالوژي کارولې او بیا د اعتراض پراساس عکس تحلیل (OBIA) طریقې. برسېره پردې، Zarco-Tejada et al. (2014) د UAV ټیکنالوژۍ او درې اړخیز عکس بیارغونې میتودونو سره یوځای کولو سره د ونې لوړوالی اندازه شوی. جیمینیز برینس لوپیز ګراناډوس، دی کاسټرو، او نور. (2017) د پرمختللي OBIA میتودولوژي سره د UAV ټیکنالوژۍ مدغم کولو سره د لسګونو زیتون ونو څو لنډمهاله ، 3D نظارت لپاره نوې پروسه وښودله. په دې کلستر کې د راتلونکي کارونو لپاره په زړه پورې لارې د اوسني ښه کول شامل دي
میتودولوژي (Zarco-Tejada et al., 2014) د ډیجیټل سطحې ماډلینګ موخو لپاره (Ajayi et al., 2017; Jaud et al., 2016)، لکه OBIA (de Castro et al., 2018, 2020; Ventura et al. ، 2018)، او د عکس بیا رغونه یا د ناول میتودونو پراختیا (Díaz-Varela et al., 2015; Torres-S' anchez et al., 2015).
کلستر 6. دا کلستر د کرنې په څارنې کې د ډرون رول په اړه بحث کوي. UAVs کولی شي د سپوږمکۍ او الوتکې امیجنگ نیمګړتیاوې بشپړې کړي او بریالي کړي. د مثال په توګه، دوی کولی شي د لږ تیلو یا پیلوټ ننګونو سره د ریښتیني وخت عکس العمل ته نږدې لوړ ریزولوشن چمتو کړي، چې پایله یې د دوامداره او ریښتیني وخت نظارت او په تصمیم نیولو کې ښه والی (S. Herwitz et al., 2004). د UAVs بله کلیدي مرسته د دوی وړتیا ده چې د دقیق کرنې یا سایټ ځانګړي کرنې لپاره د ساحې ځانګړي ډیټا چمتو کړي د دوی د لوړ حل په توګه ، د مختلف پیرامیټونو په اړه مفصل معلومات بزګرانو ته دا وړتیا ورکوي چې ځمکه په ورته برخو وویشي او د دوی سره سم چلند وکړي (Hunt et al. ، 2010؛ CC Lelong et al.، 2008؛ Primicerio et al.، 2012). دا ډول UAV پر بنسټ کرهنیز نظارت کولی شي د خوړو خوندیتوب نظارت او پریکړې کولو ملاتړ وکړي (SR Herwitz et al., 2004). د زراعتي څارنې په برخه کې د څیړنې د پرمختګ لپاره، نه یوازې په سینسرونو، UAVs، او نورو اړوندو ټیکنالوژیو کې پرمختګونو او د دوی د اړیکو او معلوماتو لیږد میتودونو ته اړتیا ده (Ewing et al., 2020; Shuai et al., 2019)، بلکې د بې پیلوټه الوتکو سره یوځای کول هم اړین دي. د سمارټ کرنې په اړه د مختلفو دندو د ښه کولو لپاره ټیکنالوژي، لکه څارنه، د کرنې څارنه، او پریکړه کول، د لوړ احتمالي څیړنې ساحه ده (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). په دې برخه کې، IoT، WSNs، او لوی ډاټا په زړه پورې بشپړونکي وړتیاوې وړاندې کوي (وان der Merwe et al.، 2020). د تطبیق لګښتونه، د لګښت سپما، د انرژۍ موثریت، او د معلوماتو امنیت د دې ډول ادغام لپاره تر څیړنې لاندې سیمو څخه دي (مسرور او نور، 2021).
هیوادونه او اکادمیک بنسټونه
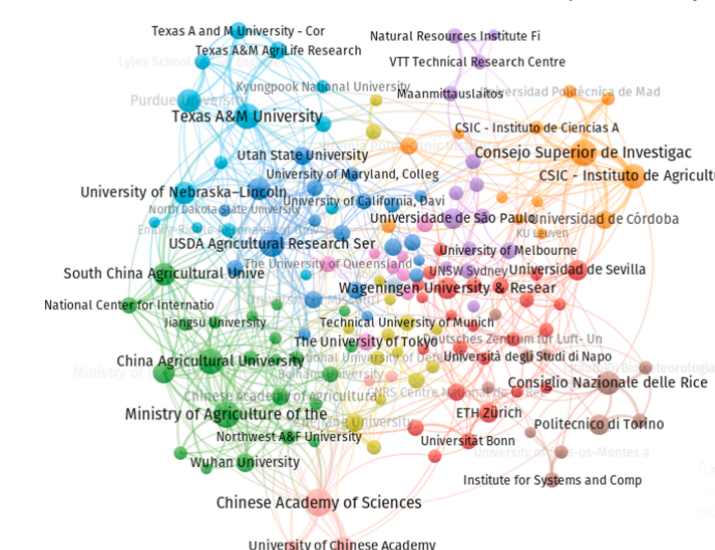
په وروستي ګام کې د اصلي هیواد پلټنه او د لیکوالانو اکادمیک تړاو شامل وو. د دې تحلیل له لارې، موږ موخه دا ده چې د پوهانو د جغرافیایي ویش په اړه ښه پوه شو چې په کرهنه کې د ډرونونو په کارولو کې مرسته کوي. دا د یادونې وړ ده چې د هیوادونو او اکاډمیکو بنسټونو تنوع ته پام وکړئ. د یو هیواد له نظره، متحده ایالات، چین، هند، او ایټالیا د خپرونو د شمیر له مخې د لیست په سر کې ځای لري (7 جدول). روانه
د کرهنیز ډرون په اړه څیړنه په لویه کچه په شمالي امریکا او آسیایی هیوادونو کې متمرکزه ده، په عمده توګه د کرهنې په دقیق غوښتنلیکونو کې د دوی د لوړې ښکیلتیا له امله. د مثال په توګه، په متحده ایالاتو کې، په 841.9 کال کې د کرهنیزو ډرونونو بازار 2020 ملیون ډالر اټکل شوی و، چې د نړیوال بازار ونډه نږدې 30٪ جوړوي (ReportLinker، 2021). د نړۍ د ستر اقتصاد په توګه په درجه بندۍ کې، اټکل کیږي چې چین به په 2.6 کال کې د بازار اندازې 2027 ملیارد ډالرو ته ورسیږي. دا هیواد د زراعتي بې پیلوټه الوتکو غوښتنه کوي ترڅو د تولیداتو ستونزې حل کړي او د ښه حاصلاتو، د کار کمولو او لږ تولیداتو لاسته راوړنې ترلاسه کړي. په هرصورت، په چین کې د ټیکنالوژۍ منل هم د فکتورونو لخوا پرمخ وړل کیږي لکه د نفوس اندازه او د موجوده فصل مدیریت طرزالعملونو نوښت او ښه کولو اړتیا.
لوړ تولیدونکي هیوادونه او پوهنتونونه / سازمانونه چې مرسته کوي
د کرنې د ډرون پورې اړوند څیړنه.
| رتبو | هیوادونه |
| 1 | امریکا |
| 2 | چین |
| 3 | هند |
| 4 | ایټالیا |
| 5 | هسپانیه |
| 6 | جرمني |
| 7 | برازیل |
| 8 | آسټرالیا |
| 9 | جاپان |
| 10 | انګلستان |
| رتبو | پوهنتونونه/ موسسې |
| 1 | د چيني علومو اکادمۍ |
| 2 | د چین د خلکو جمهوریت د کرنې وزارت |
| 3 | د کانسیجو سوپریر ډی تحقیقاتي کونکي سینیټفاساس |
| 4 | د ټیکساس A&M پوهنتون |
| 5 | د چین زراعت پوهنتون |
| 6 | د USDA زراعتي څیړنې خدمت |
| 7 | CSIC - د کرنې د تنظیم کولو انسټیټیوټ IAS |
| 8 | پدو پوهنتون |
| 9 | د ملي څیړنې شورا |
| 10 | د سویلي چین زراعت پوهنتون |
د پوهنتون او سازماني لید له نظره، د چین د علومو اکاډمۍ د خپرونو د شمیر له مخې د لیست په سر کې دی، ورپسې د چین د خلکو جمهوریت د کرنې وزارت او د Consejo Superior de Investigaciones Científicas دي. د چين د علومو اکاډمۍ د ليکوال ليو شياو هان او لي جون لخوا استازيتوب کوي. هان وینتینګ د چین د خلکو جمهوریت د کرنې وزارت استازیتوب کوي؛ او د Consejo Superior de Investigaciones Científicas استازیتوب کوي د لوپز-ګراناډوس، ´F. او پینا، جوز ماریا ایس. د متحده ایالاتو څخه، پوهنتونونه لکه د ټیکساس A&M پوهنتون او پردو پوهنتون
ذکر هغه پوهنتونونه چې تر ټولو زیاتې خپرونې لري او اړیکې یې په 4 شکل کې ښودل شوي دي. برسیره پردې، پدې لیست کې هغه ادارې شاملې دي لکه Consiglio Nazionale delle Ricerche او Consejo Superior de Investigaciones Científicas چې په ساینسي څیړنو کې فعال دي، مګر اکادمیک بنسټونه ندي. .
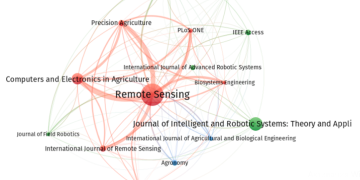
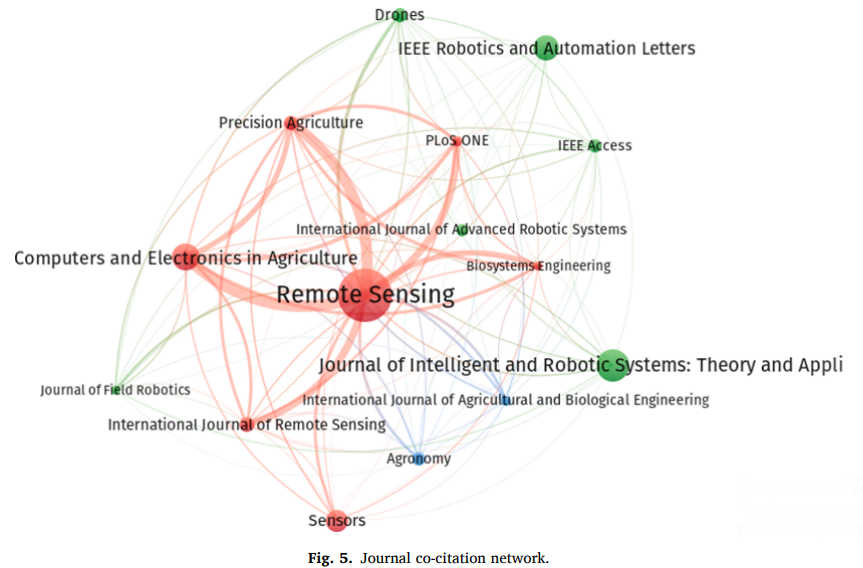
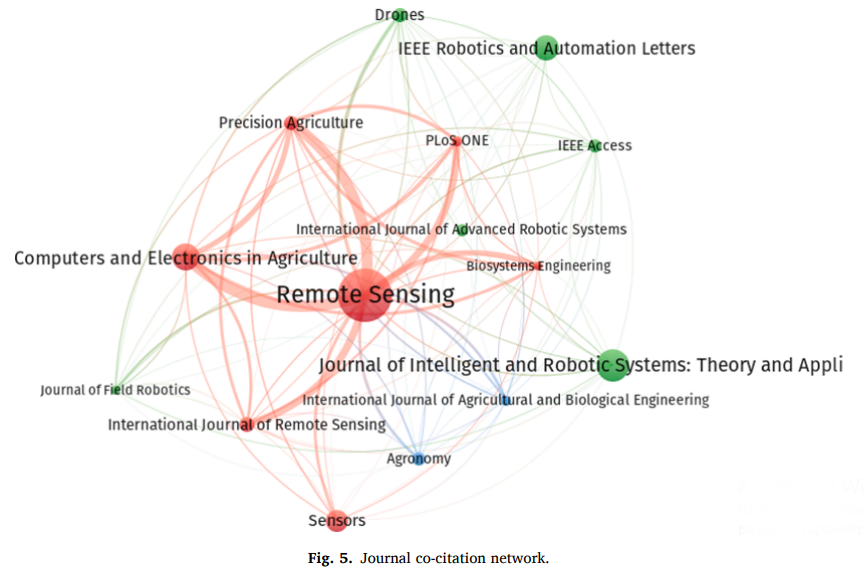
زموږ په انتخاب کې د ژورنالونو پراخه ډولونه شامل وو، چې په حقیقت کې ټول موجود معلومات پکې شامل دي. لکه څنګه چې په 8 جدول کې ښودل شوي، ریموټ سینسنګ د 258 مقالو سره په سر کې ځای لري، ورپسې د هوښیار او روبوټیک سیسټمونو ژورنال: تیوري او غوښتنلیکونه 126 او کمپیوټر او الیکترونیک په زراعت کې د 98 مقالو سره. پداسې حال کې چې ریموټ سینسنګ تر ډیره د ډرون په غوښتنلیک او پراختیا تمرکز کوي، په کرهنه کې کمپیوټر او الیکترونیک په عمده توګه په کرهنه کې د کمپیوټر هارډویر، سافټویر، برقیاتو، او کنټرول سیسټمونو پرمختګونه پوښي. د کراس ایریا پلورنځي لکه IEEE روبوټیک او اتوماتیک لیکونه د 87 خپرونو سره او IEEE لاسرسی د 34 خپرونو سره ، په ساحه کې غوره پلورونکي هم دي. د 959 اسنادو سره د 20.40 لوړ پوړو خپرونو په ادبياتو کې مرسته کړې، چې د ټولو خپرونو نږدې 5٪ جوړوي. د ژورنالیزم همغږي تحلیل موږ ته دا توان راکوي چې د خپرونو ترمنځ اهمیت او ورته والی وڅیړو. د همغږي کولو تحلیل درې کلسترونه تولیدوي، لکه څنګه چې په XNUMX شکل کې ښودل شوي. سور کلستر د ژورنالونو څخه جوړ دی لکه د ریموټ سینسنګ، کمپیوټر او الکترونیک په زراعت کې، سینسرونه،
او د ریموټ سینسنګ نړیوال ژورنال. دا ټولې رسنۍ د لیرې سینسنګ او دقیق کرنې په برخو کې خورا معتبر ژورنالونه دي. شنه کلستر هغه ژورنالونه لري چې د روبوټکس سره معامله کوي، لکه د ذہین او روبوټیک سیسټمونو ژورنال: تیوري او غوښتنلیکونه، د IEEE روبوټکس او اتوماتیک لیکونه، IEEE لاسرسی، او ډرون. دا رسنۍ اکثرا د اتومات کولو په اړه مقالې خپروي او د کرنې انجینرانو لپاره ګټورې دي. وروستی کلستر د کرنې او کرنې انجینرۍ اړوند ژورنالونو لخوا رامینځته شوی ، لکه اګرونومي او د کرنې او بیولوژیکي انجینرۍ نړیوال ژورنال.
د کرنې د ډرون پورې اړوند څیړنې کې 15 غوره ژورنالونه.
| رتبو | ژورنال | د شمېرنې د |
| 1 | ریموټ سینسینګ | 258 |
| 2 | د هوښیار او روبوټیک سیسټمونو ژورنال: تیوري او غوښتنلیکونه | 126 |
| 3 | کمپیوټر او الکترونیکی په زراعت کی | 98 |
| 4 | IEEE روبوټکس او اتوماتیک لیکونه | 87 |
| 5 | حس | 73 |
| 6 | د ریموټ سینسنګ نړیواله ژورنال | 42 |
| 7 | دقیقه کرنه | 41 |
| 8 | ډرون | 40 |
| 9 | اګرونومی | 34 |
| 10 | IEEE لاسرسی | 34 |
| 11 | د پرمختللي روبوټیک سیسټمونو نړیوال ژورنال | 31 |
| 12 | د کرنې او بیولوژیکي انجینرۍ نړیواله ژورنال | 25 |
| 13 | PLOS | 25 |
| 14 | د فیلډ روبوټیک ژورنال | 23 |
| 15 | د بایوسسټسټین انجنیری | 23 |
پایله
لنډیز
په دې څیړنه کې، موږ د کرنیزو بې پیلوټه الوتکو په اړه موجوده څیړنې لنډیز او تحلیل کړل. د مختلفو بایبلومیټریک تخنیکونو په پلي کولو سره، موږ هڅه وکړه چې د کرنې د ډرون پورې اړوند څیړنې د فکري جوړښت ښه پوهه ترلاسه کړو. په لنډه توګه، زموږ بیاکتنه په ادبياتو کې د کلیدي کلمو په پیژندلو او بحث کولو سره ډیری مرستې وړاندې کوي، د پوهې کلسترونه په ډاګه کوي پداسې حال کې چې د ډرون په ساحه کې د ورته ټولنو رامینځته کول، د پخوانیو څیړنو توضیح کول، او د راتلونکي څیړنې لارښوونې وړاندیز کوي. لاندې، موږ د کرنې د بې پیلوټه الوتکو د پراختیا په اړه د بیاکتنې اصلي موندنې په ګوته کوو:
• په تیرو لسیزو کې ټولیز ادب په چټکۍ سره وده کړې او د پام وړ پاملرنه یې راجلب کړې، لکه څنګه چې د 2012 څخه وروسته د مقالو په شمیر کې زیاتوالی ښودل شوی. که څه هم د پوهې ساحه لا تر اوسه خپل بشپړ بشپړتیا ته نه ده رسیدلې (Barrientos et al., 2011; Maes. & Steppe، 2019)، ډیری پوښتنې لاهم بې ځوابه دي. د مثال په توګه، د کور دننه کرنې کې د ډرون کارول لاهم د بحث لپاره خلاص دي (Aslan et al., 2022; Krul et al., 2021; Rold' an et al., 2015). د ساحې د صحنو پیچلتیا او د عکس اخیستنې مختلف حالتونه (د بیلګې په توګه ، سیوري او روښانتیا) کولی شي په ټولګي کې د لوړ سپیکٹرل توپیر لامل شي (Yao et al., 2019). حتی د څیړنې په وروستیو مرحلو کې، څیړونکي ننګول شوي چې د ځانګړو سناریوګانو او د اړتیا وړ عکس کیفیت (Soares et al.، 2021؛ Tu et al.
2020).
• موږ ګورو چې ساحه د اغیزمن UAV سیسټمونو له پراختیا څخه د AI تخنیکونو شاملولو ته وده کړې، لکه د ماشین زده کړه او د کرنې ډرون ډیزاین کې ژوره زده کړه (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• د زراعتي بې پیلوټه الوتکو په اړه څیړنې په عمده توګه د چاپیریال نظارت، د فصل مدیریت، او د زیان رسوونکو واښو مدیریت (کلستر 1) او همدارنګه د لیرې فینوټایپنګ او د حاصلاتو اټکل (کلستر 2) کې د ټیکنالوژۍ د امکاناتو سپړلو له لارې د ریموټ سینسنګ په اړه بحث کوي. د کرنیزو بې پیلوټه الوتکو په اړه د اغیزمنو مطالعاتو سیټ شامل دي Austin (2010), Berni et al. (2009)a، Herwitz et al. (2004)، Nex and Remondino (2014)، او Zhang and Kovacs (2012). دې مطالعاتو د کرنې په شرایطو کې د ډرون پورې اړوند څیړنې مفهوم اساس رامینځته کړی.
• د میتودولوژي اړوند، موږ ولیدل چې تر اوسه پورې ډیری څیړنې د سیسټم ډیزاین، مفکورې، یا بیاکتنې پر بنسټ مطالعاتو څخه جوړه شوې وه (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. , 2015; Yao et al., 2019). موږ د زراعتي بې پیلوټه الوتکو په تحقیق کې په کار کې د تجربې ، کیفیت ، او د قضیې مطالعې پراساس میتودونو نشتوالی هم ګورو.
په دې وروستیو کې، د کرنې د کرنې، د AI تخنیکونو، دقیق ویټیکچر، او د اوبو د فشار ارزونې پورې اړوند موضوعاتو د پام وړ پام ځانته اړولی دی (Espinoza et al., 2017; Gomez-Cand ´ on ´et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). په دوو جلا دورو کې د څیړنې کلسترونو په احتیاط سره ازموینه، 1990-2010 او 2011-2021، د ډومین د فکري جوړښت پرمختګ څرګندوي. د 1990 څخه تر 2010 پورې دوره د مرکزي مفکورو او د ډرون مفکورې رامینځته کول دي، کوم چې د UAV ډیزاین، پراختیا، او پلي کولو بحث څخه څرګند دی. په دویمه دوره کې، د څیړنې تمرکز په پخوانیو مطالعاتو پراخیږي، په کرهنه کې د UAV کارولو قضیې ترکیب کولو هڅه کوي. موږ ډیری مطالعات هم موندلي چې د امیجنگ کارونو او دقیق کرنې کې د ډرون غوښتنلیکونو په اړه بحث کوي.
| رتبو | ژورنال | د شمېرنې د |
| 1 | ریموټ سینسینګ | 258 |
| 2 | د هوښیار او روبوټیک سیسټمونو ژورنال: تیوري او | 126 |
| غوښتنلیکونه | ||
| 3 | کمپیوټر او الکترونیکی په زراعت کی | 98 |
| 4 | IEEE روبوټکس او اتوماتیک لیکونه | 87 |
| 5 | حس | 73 |
| 6 | د ریموټ سینسنګ نړیواله ژورنال | 42 |
| 7 | دقیقه کرنه | 41 |
| 8 | ډرون | 40 |
| 9 | اګرونومی | 34 |
| 10 | IEEE لاسرسی | 34 |
| 11 | د پرمختللي روبوټیک سیسټمونو نړیوال ژورنال | 31 |
| 12 | د کرنې او بیولوژیکي انجینرۍ نړیواله ژورنال | 25 |
| 13 | PLOS | 25 |
| 14 | د فیلډ روبوټیک ژورنال | 23 |
| 15 | د بایوسسټسټین انجنیری | 22 |
هغې اغیزي
زموږ د بائبلیومیټریک بیاکتنه د پوهانو، بزګرانو، د کرنې متخصصینو، د فصل مشاورینو، او د UAV سیسټم ډیزاینرانو سره په ذهن کې ډیزاین او ترسره شوې. د لیکوالانو غوره پوهه ته، دا یو له لومړنیو اصلي بیاکتنو څخه دی چې د بیبیلو میټریک ژور تحلیل یې ترسره کړی دی.
په زراعت کې د ډرون غوښتنلیکونه. موږ د دې پوهې بنسټ یوه پراخه بیاکتنه ترسره کړې، د خپرونو د حوالې او همغږي تحلیلونو په کارولو سره. د ډرون څیړنې فکري جوړښت تشریح کولو لپاره زموږ هڅې هم د اکادمیکانو لپاره نوي بصیرت وړاندې کوي. د وخت په تیریدو سره کارول شوي کلیدي کلمو ته دقیقه بیاکتنه د ډرون پورې اړوند ادب کې د هټ سپاټ او فوکل څیړنې ساحې څرګندوي. سربیره پردې ، موږ د ډیری حواله شوي مطالعاتو لیست وړاندې کوو ترڅو په ساحه کې بشپړ شوي خورا اغیزمن تحقیقي کارونه وپیژنو. د مقالو او کلیمو پیژندنه په پایله کې کولی شي د راتلونکي مطالعاتو لپاره د څو لارو موندلو لپاره یو قوي پیل ټکی چمتو کړي.
په مهمه توګه، موږ کلسترونه ښکاره کړل چې د پرتلې وړ کارونه طبقه بندي کوي او پایلې یې تشریح کړي. هغه مطالعات چې په کلسترونو کې طبقه بندي شوي د UAV څیړنې د فکري جوړښت په پوهیدو کې مرسته کوي. د پام وړ، موږ د مطالعاتو کمښت موندلی چې د ډرونونو د اخیستلو عوامل تحقیق کوي
او د کرنې په فعالیتونو کې خنډونه (۹ جدول وګورئ). راتلونکي څیړونکي کولی شي دا احتمالي تشې د تجربوي تحقیقاتو په ترسره کولو سره حل کړي چې د کرنې په بیلابیلو فعالیتونو او اقلیم شرایطو کې د ډرونونو د اختیاري عوامل ارزوي. سربیره پردې ، د ډرون اغیزې په اړه د قضیې مطالعې پراساس څیړنې باید د ساحې ریښتیني معلوماتو سره ملاتړ شي. همدارنګه، په اکاډمیک څیړنه کې د بزګرانو او مدیرانو شاملول به د ډرون څیړنې نظري او عملي پرمختګ لپاره ګټور وي. موږ د دې وړتیا هم درلوده چې خورا مشهور څیړونکي او د دوی ونډې وپیژنو، کوم چې ارزښتناکه دی ځکه چې د وروستیو سیمینل کارونو پوهاوی کولی شي د راتلونکو اکادمیک هڅو لپاره ځینې لارښوونې وړاندې کړي.
جدول 9
د UAV د منلو خنډونه.
| خنډ | Description |
| د ډاټا امنیت | سایبر امنیت د پلي کولو لپاره یوه لویه ننګونه ده د IoT حلونه (مسرور او نور، 2021). |
| متقابل عمل او ادغام | مختلف ټیکنالوژي لکه UAV، WSN، IoT، او نور. باید مدغم شي او معلومات انتقال کړي کوم چې د پیچلتیا کچه لوړه کړئ (السمهي او ال.، 2021؛ Popescu et al.، 2020؛ Vuran et al.، 2018). |
| د تطبیق لګښت | دا په ځانګړې توګه د کوچنیو کروندګرو او لپاره قضیه ده د مختلفو عصري ټیکنالوژیو یوځای کول ( مسرور او نور، ۲۰۲۱). |
| د کار پوهه او تخصص | د UAVs چلولو لپاره ماهر ډرون پیلوټانو ته اړتیا ده. همچنان ، د مختلف قطعاتو پلي کول ټیکنالوژي مسلکي کارمندانو ته اړتیا لري (YB Huang et al.، 2013؛ Tsouros et al.، 2019). |
| د انجن ځواک او الوتنه موده | بې پیلوټه الوتکې د اوږدو ساعتونو او پوښ لپاره نشي چلولی لویې سیمې (هارډین او هارډین، 2010؛ لالیبرټ او نور.، 2007). |
| ثبات، اعتبار، او وړتيا | بې پیلوټه الوتکې د خراب موسم شرایطو کې مستحکم ندي (Hardin & Hardin، 2010؛ Laliberte et al.، 2007). |
| د تادیاتو محدودیتونه او د سینسر کیفیت | بې پیلوټه الوتکې یوازې محدود بار لیږدولی شي د ټیټ کیفیت سینسرونو بارولو وړتیا (Nebiker او نور. ، 2008). |
| مقرره | لکه څنګه چې بې پیلوټه الوتکې هم خطرناک کیدی شي، سخت هم دي په ځینو برخو کې مقررات (هارډین او جینسن، 2011؛ لالیبرټ او رنګو، 2011). |
| د بزګرانو پوهه او ګټه | د نورو پرمختللو ټیکنالوژیو په څیر، ډرون ' بریالي تطبیق تخصص ته اړتیا لري او همدارنګه د ناڅرګندتیا سره یوځای (Fisher et al.، 2009; Lambert et al.، 2004؛ سټفورډ، 2000). |
څرنګه چې د حاصلاتو د اعظمي کولو لپاره د شته منابعو په اغیزمنه توګه کارولو ته دوامداره اړتیا شتون لري، بزګران کولی شي د ډرون څخه ګټه پورته کړي ترڅو د دوی د ځمکو چټک، دقیق او ارزانه سکیننګ یقیني کړي. ټیکنالوژي کولی شي د کروندګرو سره مرسته وکړي ترڅو د دوی د حاصلاتو حالت وټاکي او د اوبو وضعیت، د پخیدو مرحله، د حشراتو افتونو، او تغذیې اړتیاوې ارزوي. د بې پیلوټه الوتکو د لیرې سینس کولو وړتیاوې کولی شي کروندګرو ته مهم معلومات چمتو کړي ترڅو په لومړي مرحله کې د مسلو اټکل وکړي او په سمدستي توګه مناسب مداخلې وکړي. په هرصورت، د ټیکنالوژۍ ګټې یوازې هغه وخت احساس کیدی شي چې ننګونې په سمه توګه په نښه شي. په رڼا کې
د معلوماتو د امنیت په اړه اوسنۍ ستونزې، د سینسر ټیکنالوژۍ مسلو (د بیلګې په توګه، د اندازه کولو اعتبار یا دقت)، د ادغام پیچلتیا، او د پام وړ پلي کولو لګښتونه، راتلونکي مطالعات باید د زراعتي بې پیلوټه الوتکو د ادغام تخنیکي، اقتصادي او عملیاتي امکانات هم معاینه کړي. څنډه ټیکنالوژي.
محدودیتونه
زموږ مطالعه څو محدودیتونه لري. لومړی، موندنې د وروستي تحلیل لپاره غوره شوي خپرونو لخوا ټاکل کیږي. دا ننګونه ده چې د کرهنیز ډرون پورې اړوند ټولې اړوندې مطالعې نیول ، په ځانګړي توګه هغه چې د سکوپس ډیټابیس کې ندي لیست شوي. برسېره پردې، د معلوماتو راټولولو پروسه د لټون کلیمو ترتیب کولو پورې محدوده ده، کوم چې ممکن ټول شموله نه وي او د ناڅرګندو موندنو المل کیږي. په دې توګه، راتلونکي مطالعات باید د معلوماتو راټولولو اصلي مسلې ته ډیر پام وکړي
ډیر باوري پایلې. بل محدودیت د لږ شمیر حوالو سره نوي خپرونو پورې اړه لري. د بائبلیومیټریک تحلیل د پخوانیو خپرونو په وړاندې تعصب دی ځکه چې دوی د کلونو په اوږدو کې ډیر حوالې ترلاسه کوي. وروستي مطالعات د پام راجلبولو او حوالې راټولولو لپاره یو ټاکلي وخت ته اړتیا لري. په پایله کې، وروستي مطالعات چې د تمثیل بدلون راوړي د لسو اغیزمنو کارونو کې به درجه ونه لري. دا محدودیت د کرنې ډرون په څیر د ګړندي راپورته کیدونکي څیړنې ډومینونو ازموینې کې شتون لري. لکه څنګه چې موږ د دې کار لپاره د ادبیاتو مطالعې لپاره سکاپس سره مشوره کړې، راتلونکي څیړونکي کولی شي مختلف فکر وکړي
ډیټابیسونه، لکه د ساینس ویب او IEEE ایکسپلور، د افق پراخولو او د څیړنې جوړښت ته وده ورکولو لپاره.
احتمالي بائبلیومیټریک مطالعات ممکن د نورو حیاتي معلوماتو سرچینې لکه د کنفرانس کاغذونه ، فصلونه او کتابونه په پام کې ونیسي ترڅو د ناول لید رامینځته کړي. د کرهنیز ډرون په اړه د نړیوالو خپرونو نقشه کولو او تحقیق کولو سره سره، زموږ موندنو د پوهنتونونو د علمي پایلو تر شا لاملونه ندي ښکاره کړي. دا د څیړنې یوې نوې ساحې ته لاره هواره کوي چې په کیفیت سره تشریح کړي چې ولې ځینې پوهنتونونه د نورو په پرتله ډیر ګټور دي کله چې د کرنې په اړه څیړنې راځي.
ډرون برسېره پردې، راتلونکي مطالعات کولی شي د بې پیلوټه الوتکو احتمالي بصیرت چمتو کړي ترڅو په څو لارو کې د کرنې پایښت زیات کړي لکه د چاپیریال څارنه، د فصل مدیریت، او د زیان رسوونکو واښو نقشه کول لکه څنګه چې د ډیری څیړونکو لخوا اشاره شوې (چاموه او سنګ، 2019؛ اسلام او ال.، 2021؛ Popescu et al., 2020; J. Su, Liu, et al., 2018b). څرنګه چې د متن تحلیل د غوره شویو مقالو د ډیری شمیر له امله ممکن نه و، نو د سیسټمیک ادب بیاکتنې ته اړتیا ده چې معاینه کړي.
د څیړنې میتودونه کارول شوي او په پخوانیو مطالعاتو کې د بزګرانو ښکیلتیا. په لنډه توګه، د ډرون څیړنې زموږ تحلیل د دې پوهې بدن پټې اړیکې افشا کوي. له همدې امله دا بیاکتنه د خپرونو ترمنځ د اړیکو په موندلو کې مرسته کوي او د څیړنې ساحې فکري جوړښت لټوي. دا د ادب د مختلفو اړخونو، لکه د لیکوالانو کلیدي کلمې، تړاوونه، او هیوادونو ترمنځ اړیکې هم څرګندوي.
د سیالۍ دلچسپې اعلان
لیکوالان اعلان کوي چې دوی پیژندل شوې سیالي مالي ګټې یا شخصي اړیکې نلري چې ښیې په دې مقاله کې راپور شوي کار باندې تاثیر وکړي.
ضمیمه 1
TITLE-ABS-KEY (((ډرون* یا "بې پیلوټه الوتکې" یا uav* یا "د بې پیلوټه الوتکې سیسټمOR us یا "له لیرې پیل شوې الوتکې") او (کرنه یا کرهنه یا کرنه یا کروندګر))) او (استخراج (PUBYEAR، 2022)) او (حدود (ژبه، "انګلیسي")).
ماخذونه
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. د نباتاتو د څارنې لپاره د سپک وزن لرونکي UAV سنیپ شاټ کیمرې سره د 3D هایپرسپیکٹرل معلومات تولید کول: له
د کیفیت تضمین لپاره د کیمرې کیلیبریشن. ISPRS J. انځورګرم. ریموټ سینس. 108، 245-259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
عبدالرحمن، الف.، پرلسټین، ایل.، پرسیوال، ایف.، ۲۰۰۵. د بې پیلوټه الوتکو له عکسونو څخه د اتوماتیک الوتونکو کشف لپاره د نمونې پیژندنې الګوریتم پراختیا.
سروې. د ځمکې خبرتیا. ساینس ۶۵ (۱)، ۳۷–۴۵.
عبداللهي، ا.، رجب، ک.، رجب، ا.، مصطفی، ایم ایم، زیلاني، ایس، 2021. په کرهنه کې د بېسیم سینسر شبکې: د بایبلومیتریک تحلیل څخه بصیرت. پایښت 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., د لوړ ریزولوشن نظری عکس العمل کې د سیوري کشف لپاره د مختلف میتودونو ارزونه او په محاسبه کې د سیوري اغیزو ارزونه د NDVI، او تبخیر انتقال. اوبه ورکول. ساینس ۳۷ (۳)، ۴۰۷–۴۲۹. https://doi.org/37/s3-407-429-10.1007.
Adao, ˜ T., Hruˇska, J., Padua, ´L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Hyperspectral امیجنگ: د UAV پر بنسټ سینسرونو بیاکتنه، ډاټا پروسس او
د کرنې او ځنګلونو لپاره غوښتنلیکونه. Remote Sensing 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramirez, FC, Saiz, MP, Rosúa, FO, 2015. د لمر ګل د فصل د څارنې لپاره د بې پیلوټه الوتکې په کارولو سره څو اړخیزه عکس العمل. Biosyst. انج.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. د UAV څخه د دقیق ډیجیټل لوړوالی ماډلونو تولید د ټیټ فیصده متقابل عکسونو ترلاسه کړی. Int.
J. Remote Sens. 38 (8-10)، 3113-3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. د ریموټ سینسنګ ډیټا څخه د بایوماس او د خاورې رطوبت ترلاسه کولو لپاره د ماشین زده کړې طریقې بیاکتنه. Remote Sensing 7 (12)، 16398–16421.
السمهي، SH، افغانه، F.، سهل، R.، هوباني، A.، القنیس، MAA، Lee، B.، Guizani، M.، د شیانو شنه انټرنیټ په B5G شبکو کې UAVs کاروي: د غوښتنلیکونو بیاکتنه
او ستراتیژۍ. Ad. هک شبکه 117، 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
الثاني، ن.، البوین، الف، النعمي، ایف، زوربا، این، ۲۰۲۰. د پسونو څارویو څارنې لپاره بې پیلوټه الوتکې. په: 2020م IEEE مدیترانې الکترو تخنیکي کنفرانس. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. په لیمو کې د UAV-based لوړ throughput phenotyping د څو اړخیز عکس العمل او مصنوعي استخباراتو په کارولو سره. Remote Sensing 11 (4)، https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: د کلاوډ پر بنسټ غوښتنلیک د مصنوعي استخباراتو په کارولو سره د دقیق کرنې غوښتنلیکونو لپاره د UAV راټول شوي ډاټا پروسس، تحلیل او لیدلو لپاره. کمپیوټر الکترون. کرنه. 174، 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. په کرنه کې د هایپرسپیکٹرل معلوماتو سره لوی ډیټا او ماشین زده کړه. IEEE لاسرسی 9، 36699–36718. https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. بیاکتنه: د څړځایونو پر بنسټ د څارویو په سیسټمونو کې د مالدارۍ کرهنیز ټیکنالوژي. څاروي 16 (1)، https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´D., Mejia-Aguirre, C., د پرمختللو معلوماتو او مخابراتو ټیکنالوژیو رجحانات
د کرنیزو محصولاتو ښه والی: د کتابتون تحلیل. اګرونومي 10 (12)، 12 ماده. https://doi.org/10.3390/agronomy10121989.
آرمسټرانګ، آی.، پیرون-بروس، ایم.، سمیټ، اې.، جادود، ایم، ۲۰۱۱. د الوتنې ګېټر: په occam-π کې د هوايي روبوټکس په لور. کمیون. د پروسې معمار. 2011، 2011-329. https://doi. org/340/10.3233-978-1-60750-774-1.
ارورا، SD، چکرابورتي، A.، 2021. د مصرف کونکي شکایت کولو چلند فکري جوړښت (CCB) څیړنه: یو بایبلومیټریک تحلیل. J. د سوداګرۍ ریس. 122، 60-74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
په خلاصو ځمکو او شنو خونو کې د دقیق کرنې لپاره د UAV سره د وروستیو مطالعاتو پراخه سروې. اپل. ساینس 12 (3)، 1047. https://doi.org/10.3390/
app12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). د راتلونکي لپاره د ساحې فینوټایپینګ. د نبات کلنۍ بیاکتنې آنلاین کې (مخ. 719-736). جان
ویلی او سنز، لمیټډ doi: 10.1002/9781119312994.apr0651.
آسټین، آر.، 2010. د بې پیلوټه الوتکو سیسټمونه: د UAVS ډیزاین، پراختیا او ځای پرځای کول. په کې: د بې پیلوټه الوتکې سیسټمونه: د UAVS ډیزاین، پراختیا او
ګمارل. جان ویلی او سنز. https://doi.org/10.1002/9780470664797.
اویس، ایم، لی، وی، چیمه، ایم جے ایم، زمان، کیو، شاهین، الف، اسلم، بی، ژو، وی، اجمل، ایم، فهیم، ایم، حسین، س، ندیم، AA, Afzal, MM, Liu, C., 2022. د نبات فشار کې د UAV میشته ریموټ سینسنګ تصور د ډیجیټل کرهنیز عملونو لپاره د لوړ ریزولوشن حرارتي سینسر کارولو تصور وکړئ: یو میټا بیاکتنه. Int. J. چاپیریال. ساینس ټیکنالوژي. https://doi.
org/10.1007/s13762-021-03801-5.
باکو، ایم، برټن، اې، فیرو، ای.، ګینارو، سي، ګوټا، ا.، میټیولي، ایس، پاونیسا، ایف.، روګیري، ایم، ویرون، جی، زینیلا، ا. 2018. سمارټ کرنه: فرصتونه، ننګونې
او د ټیکنالوژۍ وړونکي. 2018 IoT عمودی او. د کرنې په اړه موضوعی غونډه - Tuscany (IOT Tuscany) 1-6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. ژوره زده کړه د UAV انځورونو کې په کرښه فصلونو کې د زیان رسوونکو واښو کشف لپاره د غیر څارل شوي ډیټا لیبل کولو سره. Remote Sensing 10 (11)، 1690.
https://doi.org/10.3390/rs10111690.
بالدي، ایس.، 1998. د حوالې په تخصیص کې د ټولنیز ساختماني پروسو په مقابل کې معیاري: د شبکې تحلیلي ماډل. ام. ټولنیز. Rev. 63 (6)، 829-846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. د تودوخې او څو اړخیزو پواسطه د تاکونو د اوبو د وضعیت د تغیر ارزونه
د بې پیلوټه الوتکې (UAV) په کارولو سره عکس العمل. اوبه ورکول. ساینس 30 (6)، 511-522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi، D.، Tondelli، A.، Desiderio، F.، Volante، A.، Vaccino، P.، Val`e، G.، Cattivelli، L.، د راتلونکي نسل نسل. د نبات ساینس ۲۴۲، ۳-۱۳. https://doi.org/242/j
plantsci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. د څارویو د څارنې لپاره د بې پیلوټه هوایی سیسټمونو کارولو په اړه لید. Outlook Agric. 47 (3)، 214-222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. د ټیټ وزن او UAV-based hyperspectral بشپړ فریم کیمرې
د فصلونو د څارنې لپاره: د وړ وړ سپیکٹرو رادیومیټر اندازه کولو سره سپیکٹرل پرتله کول. Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69-79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial Remote Sensing in Agriculture: د ساحې پوښښ لپاره یوه عملي طریقه
او د کوچني هوایی روبوټ بیړیو لپاره د لارې پلان کول. J. فیلډ روب. ۲۸ (۵)، ۶۶۷–۶۸۹. https://doi.org/28/rob.5.
بصیري، A.، ماریاني، V.، Silano، G.، عاطف، M.، Iannelli، L.، Glielmo، L.، 2022. په دقت کې د څو روټر UAVs لپاره د لارې پلان کولو الګوریتمونو پلي کولو په اړه یوه سروې
کرنه J. Navig. ۷۵ (۲)، ۳۶۴–۳۸۳.
باسنټ، بی، بنګ، جې.، 2018. د پوهې ژورې کرنې ریاست: د پلي شوي سینسنګ سیسټمونو او ډیټا تحلیلونو بیاکتنه. J. Sens. 2018، 1-13.
Bendig, J., Bolten, A., Bareth, G., 2013. UAV پر بنسټ د څو لنډمهاله، خورا لوړ ریزولوشن د فصل سطحې ماډلونو لپاره د فصل د ودې تغیرات څارلو لپاره. Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. د UAVbased RGB امیجنگ څخه اخیستل شوي د فصل د سطحې ماډلونو (CSMs) په کارولو سره د وربشو د بایوماس اټکل کول. Remote Sensing 6 (11)، 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. د فصل له سطحې څخه د UAV پر بنسټ د نبات لوړوالی سره یوځای کول ماډلونه
په وربشو کې د بایوماس د څارنې لپاره د لیدلو وړ، او نږدې د انفراریډ نباتاتو شاخصونه. Int. J. اپل. د ځمکې Obs. Geoinf. ۳۹، ۷۹–۸۷. https://doi.org/39/j.jag.79
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´G., Fereres, E., Villalobos, F., 2009a. د زیتون په باغونو کې د لوړ ریزولوشن په کارولو سره د کینوپی کنډکانس او CWSI نقشه کول
د تودوخې ریموټ سینسنګ عکس العمل. ریموټ حواس. چاپیریال. 113 (11)، 2380-2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´L., Fereres, E., 2009b. د بې پیلوټه الوتکې څخه د نباتاتو څارنې لپاره تودوخې او تنګ بانډ ملټي سپیکٹرل ریموټ سینسنگ. IEEE ټرانس. Geosci. ریموټ سینس. 47 (3)، 722-738.
بوزیمبراک، یو، کلوچ، ایم، ګوای، ا.، ماروین، HJP، 2019. د خوړو په خوندیتوب کې د شیانو انټرنیټ: د ادب بیاکتنه او د کتابتون تحلیل. Trends Food Sci. ټیکنالوژي. 94,54-64 https://doi.org/10.1016/j.tifs.2019.11.002
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT په زراعت کې: د اروپا په کچه د لوی پیمانه پیلوټ ډیزاین کول. IEEE کمیون. میګ. ۵۵ (۹)، ۲۶–۳۳.
Buters, TM, Belton, D., Cross, AT, 2019. د ملی متر دقت سره د انفرادي تخمونو او تخم کولو ټولنو ملټي سینسر UAV تعقیب. ډرون ۳ (۴)، ۸۱.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. د UAV انځورونو څخه د دقیق کرنې غوښتنلیکونو لپاره د څو اړخیز انځورونو او نباتاتو شاخصونو ارزونه. Remote Sensing 7 (4)، 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q. Zhang, SY, 2020. د UAV څخه اخیستل شوي د پراخه متحرک رینج نباتاتو شاخص (WDRVI) په کارولو سره د شکر چوغندر د ودې شاخصونو څارنه
څو اړخیز انځورونه کمپیوټر الکترون. کرنه. 171، 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas، J.، Acedo، F. د کورنۍ سوداګرۍ بیاکتنه 2007 (20)، 2-141.
سین، ایچ، وان، ایل، ژو، جې، لی، یو، لی، ایکس، ژو، یو، وینګ، ایچ، وو، وو، ین، وو، سو، سی. Bao, Y., Feng, L., Shou, J., He, Y., 2019. د وریجو د بایوماس متحرک څارنه
د دوه اړخیز عکس فریم سنیپ شاټ کیمرې سره د سپک وزن UAV په کارولو سره مختلف نایټروجن درملنه. د نبات طریقې 15 (1)، 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. د ملکي UAV له لارې د هند په کرهنه کې د پایښت خوندي کول: د مسؤلیت نوښت لید. SN اپل. ساینس 2 (1)، 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. د هندي فصل بیمې غوښتنلیکونو لپاره د ملکي بې پیلوټه الوتکې (UAV) نوښتونو مسؤلیت اداره. J. مسؤل
ټیکنالوژي. 9، 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. د کرهنې اوبولګولو مدیریت لپاره د فصل د کنډوکي د لوړ ریزولوشن لید چینل هوایی عکس العمل پلي کول. کرنه. اوبه
اداره 216، 196-205. https://doi.org/10.1016/j.agwat.2019.02.017
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. په بورډ کې د فوټوګرامیري او واحد فریکوینسي GPS موقعیت سره د سپک وزن UAV د میټرولوژی غوښتنلیکونو لپاره. ISPRS J. انځورګرم. ریموټ سینس. 127، 115-126. https://doi.org/10.1016/j.isprsjprs.2016.12.007
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Blockchain-based IoT پلیټ فارم د خپلواکه ډرون عملیاتو مدیریت لپاره. په کې: د دوهم ACM عمل
د موبي کام ورکشاپ د ډرون په مرسته د بې سیم مخابراتو لپاره د 5G او هاخوا لپاره، pp. 31-36. https://doi.org/10.1145/3414045.3415939.
ورځ، RA، Gastel، B.، 1998. څنګه یو ساینسي مقاله لیکل او خپرول. د کیمبرج پوهنتون پریس. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´F., 2020. نقشه کول د سینوډون ډاکټیلون انفیکشن فصلونه د اتوماتیک پریکړې ونې - OBIA کړنالرې سره پوښ کړئ او د دقیق ویټیکچر لپاره د UAV عکس العمل. Remote Sensing 12 (1)، 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S' anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez-'Granados, F., 2018. د دې لپاره یو اتوماتیک تصادفي ځنګل-OBIA الګوریتم د زیان رسوونکو واښو ابتدايي نقشه د UAV انځورونو په کارولو سره د فصلونو قطارونو ترمنځ او دننه. Remote Sensing 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. د UAV انځور څخه اخیستل شوي DSM په کارولو سره د غنمو جینټایپونو د نبات لوړوالی اتوماتیک اندازه کول. اجراات 2 (7)، 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. د بې پیلوټه الوتکو په کارولو سره د ریښتیني وخت زیان رسوونکو واښو نقشه کولو لپاره د سپک وزن سیمانټیک سیګمینټ شبکه. اپل. ساینس 10 (20)، 7132. https://doi.org/10.3390/app10207132.
ډینګ، ایل، ماو، زی، لی، ایکس، هو، زی، دوان، ایف.، یان، و، 2018. د دقیق کرنې لپاره د UAV پر بنسټ ملټي سپیکٹرل ریموټ سینسنگ: د مختلف کیمرونو ترمنځ پرتله کول. ISPRS J. انځورګرم. ریموټ سینس. 146، 124-136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. د ماشین زده کړه او د لرې حس کولو تخنیکونه د خاورې شاخصونو اټکل کولو لپاره پلي شوي - بیاکتنه. ایکول. Ind. 135، 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´L., Zarco-Tejada, PJ, 2015. د 3D عکس په کارولو سره د زیتون د ونې تاج پیرامیټرونو ارزولو لپاره د لوړ ریزولوشن هوایی UAV انځور
بیا رغونه: د نسل ورکولو په آزموینو کې غوښتنلیک. Remote Sensing 7 (4)، 4213–4232. https://doi.org/10.3390/rs70404213.
ډیکشیټ، A.، Jakhar، SK، 2021. د هوایی ډګر ظرفیت مدیریت: بیاکتنه او د کتابتون تحلیل. J. هوایی ټرانسپ. اداره 91، 102010.
دونګ، ټي.، شنګ، جي، ليو، جي، کيان، بي، جينګ، ق.، ما، بي، هوفمن، ټي.، ګنګ، ایکس، سو، ا.، شي، يو. کینیسیس، ایف، جیاو، ایکس، کوواکس، جی ایم، والټرز، ډي، کیبل، جې، ولسن، جې، 2019.
په اونټاریو، کاناډا کې د حاصلاتو د ودې او حاصلاتو د ساحې دننه د بدلون موندلو لپاره د RapidEye انځورونو کارول. دقیق زراعت. 20 (6)، 1231-1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. د کوویډ - 19 څخه وروسته د خوراکي توکو رسولو سلسلې د پوهیدو لپاره د زراعتي ډرون او iot کارول. په کې: چوهدري، ا.، بسواس، ا.، پرتیک، ایم.،
چکرابارتي، A. (Eds.)، کرهنیز معلوماتي پوهه: د IoT او ماشین زده کړې په کارولو سره اتومات. ویلی، مخونه 67-87. وان ایک، این، والټمن، ایل، 2009. د سافټویر سروې: VOSviewer، د بائبلیومیتریک نقشه کولو لپاره د کمپیوټر پروګرام. ساینټومیټریک 84 (2)، 523-538. https://doi.org/10.1007/s11192-009-0146-3.
الیاس، او، رحمان، TA، Orikumhi، I.، Leow، CY، Hindia، MN، 2018. د شیانو انټرنیټ (IoT) یوه عمومي کتنه او په کرهنه کې د معلوماتو تحلیل: ګټې او ننګونې.
IEEE انټرنیټ شیان J. 5 (5)، 3758-3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. د زراعتي اعتبار تصدیق UAV او ساحه
د روميانو د ډولونو لپاره اندازه کول. کمپیوټر الکترون. کرنه. 158، 278-283. https://doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S. Jacoby, PW, 2017. د لوړ ریزولوشن ملټي سپیکٹرل او حرارتي ریموټ سینسنګ پر بنسټ د اوبو فشار ارزونه
د ځمکې لاندې خړوب شوي انګورو. Remote Sensing 9 (9)، 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. د خاورې د درجې لپاره د هایپرسپیکٹرل ریموټ سینسنګ کارول. Remote Sensing 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D. Panigada, C. Tagliabue, G. Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U. انډرسن، K.، 2020. په عملیاتي شرایطو کې د ډرون پر بنسټ د څو اړخیز سطحي انعکاس او د نباتاتو شاخصونو څو اړخیزه ارزونه. Remote Sensing 12 (3)، 514.
فینګ، ایکس، یان، ایف، لیو، ایکس، 2019. د دقیق کرنې لپاره د شیانو په انټرنیټ کې د بېسیم مخابراتي ټیکنالوژیو مطالعه. بې سیم Pers. کمیون. ۱۰۸ (۳)
1785-1802.
فیریرا، ایم پی، پنټو، CF، سیرا، FR، 2014. د نړیوالې سوداګرۍ څیړنې کې د لیږد لګښت تیوري: د دریو لسیزو په اوږدو کې د بائبلیومیټریک مطالعه. ساینټومیټریک 98 (3)، 1899-1922. https://doi.org/10.1007/s11192-013-1172-8.
فشر، پی، ابوزر، ایم.، راب، ایم.، بیسټ، ایف، چندرا، ایس، 2009. په سویل ختیځ آسټرالیا کې د دقیق کرنې پرمختګ. I. د انډول کولو لپاره د راجستریشن میتودولوژي
د حبوباتو په حاصلاتو کې ځایي بدلون د کروندګرو د تاریخي پاډاک حاصلاتو او نورمال شوي توپیر د نباتاتو شاخص په کارولو سره. فصل څړځای ساینس 60 (9)، 844-858.
Floreano, D., Wood, RJ, 2015. ساینس، ټیکنالوژي او د وړو خپلواکو ډرونونو راتلونکی. فطرت 521 (7553)، 460-466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. د سمارټ کرنې د راتلونکي لپاره د شیانو انټرنیټ: د راڅرګندیدونکي ټیکنالوژیو پراخه سروې. IEEE CAA J. Autom. سینیکا 8 (4)، 718-752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´JM, 2019. د انځر د نباتاتو قطع کول له هوایی عکسونو څخه د ژور کنولوشنال انکوډر - ډیکوډر شبکې په کارولو سره. Remote Sensing 11 (10)، 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs ننګونه د اوبو فشار ارزونه
دوامداره کرنه کرنه. د اوبو مدیریت. 153، 9-19. https://doi.org/10.1016/j agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ Andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. حرارتي عکس العمل په نبات کې
د اوبو لګولو د کمښت ستراتیژیو لاندې د بادامو په ونو (cv. Guara) کې د فصل د اوبو وضعیت ارزولو کچه. کرنه. د اوبو مدیریت. 208، 176-186. https://doi.org/10.1016/j
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. د سطحي انعکاس او د لمر انعکاس شوي فلوروسینس سپیکٹروسکوپي اندازه کول د کوچني هایپرسپیکٹرل UAS په کارولو سره. Remote Sensing 9 (5)، 472. https://doi.org/10.3390/rs9050472. Gaˇsparovic'c, M., Zrinjski, M., Barkovi'c, Đ., Radoˇcaj, D., 2020. لپاره یو اتوماتیک میتود
د اوټ په ساحو کې د زیان رسوونکو واښو نقشه د UAV انځورونو پراساس. کمپیوټر الکترون. کرنه.
ګیبرز، آر، ادمچوک، VI، 2010. دقیق کرهنه او د خوړو خوندیتوب. ساینس 327 (5967)، 828-831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. د جوارو د حاصلاتو ګډ طیف او ځایي ماډلینګ د بې پیلوټه الوتکې سیسټم سره ترلاسه شوي د هوایی عکسونو او فصل سطحې ماډلونو پراساس. Remote Sensing 6 (11)، 10335–10355. https://doi.org/10.3390/rs61110335.
ګینګ، ډي، فینګ، یو، ژو، کیو، 2020. د کاروونکو لپاره دوامدار ډیزاین: د ادب بیاکتنه او د کتابتون تحلیل. چاپیریال. ساینس ککړتیا. Res. 27 (24)، 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. د ملټي سپیکٹرل سپوږمکۍ او هایپرسپیکٹرل په یوځای کولو سره د طیف وختي غبرګون سطحونو تولید
د دقیق کرنې غوښتنلیکونو لپاره د UAV عکس. IEEE J. Sel. پورته. اپل. د ځمکې Obs. ریموټ سینس. 8 (6)، 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. IoT پر بنسټ کرنه د بادل او لوی ډیټا خدمت په توګه: د ډیجیټل هند پیل. J. ارګ. او د پای کارونکي کمپیوټر. (JOEUC) 29 (4)،
1-23.
Gmür, M., 2006. د شریک حوالې تحلیل او د نه لیدلو کالجونو لټون: یوه میتودولوژیکي ارزونه. ساینټومیټریک 57 (1)، 27-57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. د بې پیلوټه الوتکو (UAVs) لخوا د جوارو د بوټو ډیجیټل حسابونه. Remote Sensing 9 (6). https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. د اوبو د زیان رسوونکو واښو څارنې لپاره د روټري وزر بې پیلوټه هوایی موټر
مدیریت J. Intel. روبوټیک سیسټم: تیور. اپل. ۵۷ (۱–۴)، ۴۶۷–۴۸۴. https://doi. org/57/s1-4-467-484.
Gomez-Cand ´on, ´D., De Castro, AI, Lopez-Granados, ´F., 2014. په غنمو کې د دقیق کرنې اهدافو لپاره د بې پیلوټه الوتکې (UAV) عکسونو څخه د موزیک دقت ارزونه. دقیق. کرنه. 15 (1)، 44-56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´on, ´D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. د UAV-حساس انځور لخوا د ونې په پیمانه د اوبو د فشار ساحه فینوټایپ : لپاره نوي بصیرت
د تودوخې استملاک او کیلیبریشن. دقیق. کرنه. 17 (6)، 786-800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. د لیمو په باغونو کې د اوبو د کمښت د شاخص په توګه د فصل د اوبو فشار شاخص کارولو تطبیق او محدودیتونه. کرنه. لپاره. میټیرول. 198-199، 94-104. https://doi.org/10.1016/j agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´E., Nortes, PA, Alarcon, ´JJ, Intrigliolo, DS, Fereres, E., 2013. د لوړ ریزولوشن UAV حرارتي عکس العمل کارول
په سوداګریز باغ کې د پنځو میوه لرونکو ونو ډولونو د اوبو حالت کې تغیر ارزونه وکړئ. دقیق. کرنه. 14 (6)، 660-678. https://doi.org/10.1007/s11119-013-9322-9.
ګویل، K.، کمار، ایس.، 2021. مالي سواد زده کړه: یو سیستماتیک بیاکتنه او د ژبپوهنې تحلیل. Int. J. د مصرف کونکي مطالعات 45 (1)، 80-105. https://doi.org/10.1111/
ijcs.12605.
ګرینزډورففر، ¨ GJ، انجیل، A.، Teichert، B.، 2008. د ځنګلونو او کرنې په برخه کې د ټیټ بیه uavs فوټوګرامیټریک ظرفیت. د فوټوګرامیټری نړیوال آرشیف، ریموټ سینسینګ او د ځایی معلوماتو ساینس - ISPRS آرشیف 37، 1207-1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
ګوان، ایس.، فوکامي، K.، ماتسوناکا، ایچ.، اوکامي، ایم.، تاناکا، آر.، ناکانو، ایچ.، ساکای، ټي.، ناکانو، K.، اوهدان، ایچ.، تاکاهاشي، K. 2019. د لوړ ریزولوشن ارتباط ارزونه
NDVI د سرې د استعمال کچه او د وریجو او غنمو حاصلات د کوچني UAVs په کارولو سره. Remote Sensing 11 (2)، 112.
ګندولف، K.، فلسر، ایم، 2013. مدیریت څیړنه او مذهب: د حوالې تحلیل. J. بس. اخلاق 112 (1)، 177-185.
ګو، Q.، ژو، Y.، تانګ، Y.، Hou، C.، He، Y.، Zhuang، J.، Zheng، Y.، Luo، S.، 2020. د CFD سمول او د ځایي تجربوي تصدیق او د لنډمهاله توزیع
په هور کې د کواډ روټر زراعتي UAV د ښکته هوا جریان. کمپیوټر الکترون. کرنه. 172، 105343 https://doi.org/10.1016/j.compag.2020.105343.
هایغتالاب، الف، ګونز الیز پیریز، ایل، مونډال، ایس، سنګ، ډي، شینسټاک، ډي.، روتکوسکي، جې، اورټیز-موناستریو، آی، سنګ، آر پی، ګوډین، ډي. ، پولنډ، ج.، 2016.
د غنمو د لوی نسل پالنې د لوړ تولید فینوټایپینګ لپاره د بې پیلوټه هوایی سیسټمونو کارول. د نبات میتود 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. د مختلفو روښانتیا شرایطو لاندې د UAVs څخه سپیکٹرل عکس العمل . په GG Bill R. (Ed.) کې، د فوتوګرامري نړیوال آرشیف، د ریموټ سینسنګ او سپیشل انفارمیشن ساینسز—ISPRS آرشیف (۴۰ ټوک، ګڼه 40W1، مخ. 2-189). د فوټوګرامیټری او ریموټ سینسنګ نړیواله ټولنه. https://www.scopus.com/inward/record.uri?eid=194-s2-2.0.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. د بې پیلوټه الوتکې څخه د ټاپو د نباتاتو نقشه کولو تخنیکونه
د موټر (UAV) انځورونه: د پکسل طبقه بندي، بصری تفسیر او د ماشین زده کړې طریقې. Int. J. اپل. د ځمکې Obs. Geoinf. 89، 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. په بنګله دیش کې د مسؤل مشرتابه له لارې سمارټ کرنه: امکانات، فرصتونه، او هاخوا.
دوامدار ۱۳ (۸)، ۴۵۱۱.
هارډین، PJ، هارډین، TJ، 2010. د چاپیریال په څیړنه کې د وړو پیمانه لیرې پیل شوي وسایط. جغرافیه کمپاس 4 (9)، 1297-1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
هارډین، PJ، جینسن، RR، 2011. د چاپیریال ریموټ سینسنگ کې د کوچنۍ کچې بې پیلوټه الوتکې: ننګونې او فرصتونه. GISci. ریموټ سینس. 48 (1)، 99-111. https://doi.org/10.2747/1548-1603.48.1.99
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. د شیانو کرهنیز انټرنیټ: ټیکنالوژي او غوښتنلیکونه، (لومړی نسخه. 1 چاپ). پسرلی.
هیرویټز، ایس آر، جانسن، ایل ایف، ډونګن، ایس ای، هیګینس، آر جی، سلیوان، ډی وی، ژینګ، جې، لوبیتز، بی ایم، لیونګ، جی جی، ګالمیر، بی اے، اویاګی، ایم، سلی، ری، پیتل، JA، ۲۰۰۴.
د بې پیلوټه الوتکې څخه عکس اخیستل: د کرنې څارنه او د پریکړې ملاتړ. کمپیوټر الکترون. کرنه. 44 (1)، 49-61. https://doi.org/10.1016/j
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, د UAV پر بنسټ د ریموټ سینسنګ په کارولو سره د ساحې پلاټ آزموینې کې د غنمو د بوټو لوړوالی او د ودې کچه د لوړې کچې ساحې فینوټایپ کول. Remote Sensing 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. پروسس او ارزونه د سپیکرومیټریک، سټیریوسکوپیک عکس العمل د دقیق کرنې لپاره د سپک وزن UAV طیف کیمرې په کارولو سره راټول شوی. Remote Sensing 5 (10)، 5006–5039. https://doi.org/10.3390/rs5105006.
حسین موتلغ، ن.، طالب، ټي.، اروک، او.، ۲۰۱۶. د ټیټ لوړوالی بې پیلوټه الوتکې د شیانو خدماتو پر بنسټ انټرنیټ: جامع سروې او راتلونکي لید. IEEE انټرنیټ شیان J. 2016 (3)، 6-899. https://doi.org/922/JIOT.10.1109.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. د UAV لپاره د ښاري کنډوالو ګډ آپټیک جریان او سټیریو پر بنسټ نیویګیشن. په: 2005 IEEE/RSJ
د هوښیار روبوټونو او سیسټمونو په اړه نړیوال کنفرانس، 3309-3316 مخ. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.C., Y.C., H., Chung, Y.-C., Hsu, C.-H., 2020. د کلاوډ فوګ کمپیوټري لپاره د IoT کرهنیز پلیټ فارم. دوام. کمپیوټر Inf. سيسټ 28، 100285.
هوانګ، ایچ، دینګ، جې، لان، ی، یانګ، اې، دینګ، ایکس، ژانګ، ایل، ګونزالیز-اندوجر، جي ایل، 2018. د بې پیلوټه الوتکو د زیان رسوونکو واښو نقشه کولو لپاره په بشپړه توګه قانع کونکي شبکه ( UAV) انځورونه. PLOS ONE 13 (4)، e0196302.
هوانګ، H.، لان، Y.، Yang، A.، Zhang، Y.، Wen، S.، Deng، J.، 2020. د UAV انځورونو د زیان رسوونکو واښو نقشه کولو کې د اعتراض پر بنسټ د انځور تحلیل (OBIA) په وړاندې ژوره زده کړه. Int. ج.
ریموټ سینس. 41 (9)، 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
هوانګ، هو، يانګ، اي، تانګ، يو، ژوانګ، جي، هو، سي، تان، ژ، داننجيان، ايس، هو، يو، ګوو، ق.، لو، س. 2021. د فصل په نظارت کې د UAV عکسونو لپاره ژور رنګ کیلیبریشن
د سیمه ایزو نړیوالو پاملرنو سره د سیمانټیک سټایل لیږد کارول. Int. J. اپل. د ځمکې Obs. Geoinf. 104، 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. د کرهنیز تولید لپاره د بې پیلوټه الوتکو ټیکنالوژۍ پراختیا او احتمال
مدیریت Int. J. زراعت بایول. انج. 6 (3)، 1-10. https://doi.org/10.3965/j ijabe.20130603.001.
هوانګ، Y.، Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK، 2009. د بې پیلوټه الوتکې پلیټ فارم لپاره د سپری سیسټم پراختیا. اپل. انج. کرنه. 25 (6)، 803-809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. د NIR-شنه - نیلي ډیجیټل عکسونو اخیستل
د کښت څارنې لپاره بې پیلوټه الوتکې. Remote Sensing 2 (1)، 290-305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. سپوږمکۍ- او د ډرون پر بنسټ د ځیرک کرنې لپاره د فصلونو او خاورې لیرې سینسنگ – یوه بیاکتنه. د خاورې ساینس. د نبات تغذیه. ۶۶ (۶)، ۷۹۸–۸۱۰. https://doi.org/66/6.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. د انټرنیټ د شیانو (IoT) لپاره د غوښتنلیکونو او مخابراتي ټیکنالوژیو بیاکتنه او
د بې پیلوټه الوتکې (UAV) پر بنسټ دوامداره سمارټ کرنه. پایښت 13 (4)، 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. د لوړ ریزولوشن ډیجیټل سطحي ماډلونو دقت ارزونه
PhotoScan® او MicMac® په فرعي غوره سروې شرایطو کې. Remote Sensing 8 (6)، https://doi.org/10.3390/rs8060465.
Jim'enez-Brenes, FM, Lopez-Granados, ´F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017. د زیتون د ونې په جوړښت او کلنۍ د شاخه بري اغیزې اندازه کول د UAV-based 3D ماډلینګ په کارولو سره د کینوپی وده. د نبات طریقه 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl'e, M., Comar, A., 2017. د غنمو د نباتاتو د کثافت اټکل د خورا ټیټ لوړوالی UAV انځور څخه په راڅرګندېدو کې. لرې حس.
چاپیریال. 198، 105-114. https://doi.org/10.1016/j.rse.2017.06.007
Jinbo, C., Xiangliang, C., Han-chi, F., Lam, A., 2019. د کرنې محصولاتو د څارنې سیسټم چې د کلاوډ کمپیوټر لخوا ملاتړ شوی. کلستر کمپيوټر. ۲۲ (۴)، ۸۹۲۹–۸۹۳۸.
Ju، C.، & Son، HI 2018a. په کرنه کې د ریموټ سینسنګ لپاره د ډیری UAV سیسټمونو فعالیت ارزونه. د روبوټکس او اتوماتیک IEEE نړیوال کنفرانس (ICRA)، برسبین، آسټرالیا، 21-26 کې په کرهنه کې د روبوټیک لید او عمل په اړه د ورکشاپ بهیر.
Ju، C.، زوی، HI، 2018b. د کرنیزو غوښتنلیکونو لپاره ډیری UAV سیسټمونه: کنټرول، تطبیق، او ارزونه. برقیات 7 (9)، 162. https://doi.org/10.3390/
برقیات7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. د ښه کولو لپاره د وسیلو په توګه د ریموټ سینسنګ او مصنوعي استخباراتو احتمال
د کرنې د تولید سیسټمونو انعطاف. کرر نظر بایو ټیکنالوژي. 70، 15-22. https://doi.org/10.1016/j.copbio.2020.09.003
کالیشوک، ایم، پارټ، ایم ایل، فریمن، جې ایچ، راج، ډي، دا سلوا، ایس، ایوبانکس، ایس، ویګینس، ډی جی، لولر، ایم، مارویس، جې، میلینجر، ایچ سی، داس، ج. , 2019. د کرپټ سکاوټینګ یو پرمختللی تخنیک چې په هندواڼو کې د ګمی سټیم بلیټ لپاره په دودیز سکاوټینګ تمرین کې د بې پیلوټه هوایی موټرو په مرسته ملټي سپیکٹرل فصل عکس العمل شاملوي. د نبات ډیس. 103 (7)، 1642-1650.
کپور، KK، تاملماني، K.، رانا، NP، پتیل، P.، دویدي، YK، نیرور، ایس، 2018. د ټولنیزو رسنیو په څیړنه کې پرمختګونه: تیر، اوسنی او راتلونکی. خبر کړي. سيسټ مخکی. 20
(3)، 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: د څو اړخیز عکسونو او ژورو نقشو پراساس د تاک ناروغۍ کشف شبکه. Remote Sensing 12 (20)، 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. د انګورو د باغ لپاره د سپوږمکۍ او UAV پر بنسټ د څو اړخیز انځورونو پرتله کول
د تغیر ارزونه Remote Sensing 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.C., Park, N., 2020. IoT-blockchain د پرمختللي ژورې زده کړې په کارولو سره د خواړو صنعت 4.0 لپاره مطلوب ثابت سیسټم فعال کړ. سینسر 20 (10)، 2990.
خان, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. د انځور پر بنسټ د نباتاتو د ناروغیو کشف: د کلاسیک ماشین زده کړې څخه د ژورې زده کړې سفر ته. بې سیم کمون. د موبایل کمپیوټر. 2021، 1-13.
خان، ایس، طفیل، ایم، خان، ایم، ټي، خان، زیډ، اقبال، ج.، عالم، ایم، لی، KNQ، 2021. د UAV پر بنسټ د نباتاتو / زیان رسوونکو واښو طبقه بندي لپاره یو نوی نیمه څارل شوی چوکاټ. PLOS ONE 16 (5)، e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. په دقیق کرهنه کې د تودوخې ریموټ سینسنګ اوسني او احتمالي غوښتنلیکونو یوه عمومي کتنه. کمپیوټر الکترون.
کرنه. 139، 22-32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. د شیانو د انټرنیټ ارتقاء (IoT) او د دقیق کرنې په برخه کې د پام وړ اغیزه. کمپیوټر الکترون. کرنه. 157، 218-231.
Kim, W, Khan, GF, Wood, J., محمود, MT, 2016. د دوامدار سازمانونو لپاره د کارمندانو ښکیلتیا: د ټولنیزو شبکو تحلیلونو په کارولو سره د کلیدي کلمې تحلیل او دفن
د کشف طریقه پایښت 8 (7)، 631.
Kirsch, M, Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. ادغام د ځمکې او بې پیلوټه الوتکو څخه
د اکتشاف نقشه کولو او کان کیندنې څارنې لپاره د هایپرسپیکٹرل او فوټوګرامیټریک سینس کولو میتودونه. Remote Sensing 10 (9)، 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. د ژورې زده کړې او UAV انځورونو په کارولو سره د جوارو بوټو شمیرل. IEEE Geosci. لیرې حس. Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. د لوړې کچې انځور پر بنسټ د نبات فینوټایپینګ لپاره د اتوماتیک ماشین زده کړه. Remote Sensing 13 (5)، 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. د کارګو UAVs د اکوسیستم په پراختیا کې عصري تخنیکي تمایلات. J. فزیک. conf. سیر. 1515 (5)، 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. د کور دننه څارویو او کرنې لپاره بصری SLAM د مونوکولر کیمرې سره د کوچني ډرون په کارولو سره: د امکان وړ مطالعه.
ډرون 5 (2)، 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie'c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. د کرنې د اتومات کولو لپاره د ډرونونو سروې له کښت څخه تر
حاصل په دې کې: INES 2018 – IEEE 22م نړیوال کنفرانس د هوښیار انجینري سیسټمونو په اړه، pp. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. د UAV IoT چوکاټ نظریات او ننګونې: د "شیانو" په توګه د ډرونونو د ساتنې په لور. سینسر 18 (11)، 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. د فرعي ډیسیمیټر عکسونو تحلیل لپاره د عکس پروسس او طبقه بندي کړنالرې چې په وچه کې د بې پیلوټه الوتکې سره ترلاسه شوي.
rangelands GISci. ریموټ سینس. 48 (1)، 4-23. https://doi.org/10.2747/1548-1603.48.1.4
Laliberte, AS, Rango, A., Herrick, JE, 2007. بې پیلوټه الوتکې د رینجلینډ نقشه کولو او څارنې لپاره: د دوه سیسټمونو پرتله کول. د ASPRS کلنۍ کنفرانس بهیر.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. په اصلي څړځای کې د زیان رسوونکو واښو نقشه کولو لپاره د خلاصې سرچینې کاري جریان
د بې پیلوټه الوتکې کارول: د قضیې مطالعې په توګه د Rumex obtusifolius کارول. یورو. J. Remote Sens. 54 (sup1)، 71-88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. د کرنې د کرهنیز معلوماتو غوره کول، ګټه اخیستنه، او غوره کارول.
کاري کاغذ. د پردو پوهنتون. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. په کوچنیو پلاټونو کې د غنمو د فصل د کمیتي څارنې لپاره د بې پیلوټه الوتکو د عکسونو ارزونه. سینسر 8 (5)، 3557–3585. https://doi.org/10.3390/s8053557.
لی، سی، نیو، بی، 2020. د لوی ډیټا او د شیانو انټرنیټ پراساس د سمارټ کرنې ډیزاین. Int. J. ویش. احساس. شبکه. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. د لوړ ریزولوشن سټیریو عکسونو په کارولو سره د جوارو د کنډو لوړوالی او د ځمکې لاندې بایو ماس لرې اټکل د ټیټ لګښت بې پیلوټه الوتکې سیسټم. ایکول. Ind. 67، 637-648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. په کرنه کې د ماشین زده کړه: یوه بیاکتنه. سینسر 18 (8)، 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. د ګرځنده څو سینسر طریقې سره د جوار د ځانګړتیاوو لرې، هوایی فینوټایپنګ. د نبات طریقې 11 (1)، 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. د بې پیلوټه هوایی سیسټم عکسونو او ژورې زده کړې په کارولو سره د سورغم پانیکل کشف او شمیرل. مخکی. د نبات ساینس 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. د کلاوډ کمپیوټینګ پر بنسټ د عصري ایکو زراعت د څارنې سیسټم د شیانو انټرنیټ. IEEE لاسرسی 7، 37050–37058.
Lopez-Granados, ´F., 2011. د ساحې ځانګړي زیان رسوونکو واښو مدیریت لپاره د زیان رسوونکو واښو کشف: نقشه کول او د ریښتیني وخت طریقې. Weed Res. 51 (1)، 1-11. https://doi.org/10.1111/j.1365-3180.2010.00829.x
لوپز-ګراناډوس، ´F.، توریس-سانچیز، ´J.، دی کاسټرو، A.I.، Serrano-P´erez، A.، MesasCarrascosa، F.J.، Pena، J.-M. , 2016. د لوړ ریزولوشن UAV انځورونو په کارولو سره د واښو په فصل کې د واښو زیان رسوونکو واښو ابتدايي څارنه. اګرون. دوام. دیو. 36 (4)، 1-12
Lopez-Granados, ´F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, J.-M., 2016. د لمر ګل په لومړیو فصلونو کې د زیان رسوونکو واښو نقشه کول د UAV ټیکنالوژۍ په کارولو سره: د زیان رسوونکو واښو په وړاندې د بوټو وژونکو درملنې نقشې تغیرات. دقیق. کرنه. 17 (2)، 183-199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – د څو روټر بې پیلوټه الوتکې سیسټم څخه د عکس اخیستنې سپیکٹروسکوپي. J. فیلډ روب. ۳۱ (۴)
571-590 https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. د ځمکې د لیزر سکینګ کرنیز فصلونه په JJ کې
چن جې ماس H-G. (Ed.)، د انځورګرمیټری نړیوال آرشیف، د ریموټ سینسنګ او ځایی معلوماتی علومو-ISPRS آرشیفونه (جلد 37، مخ. 563-566).
د فوټوګرامیټری او ریموټ سینسنګ نړیواله ټولنه. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
ما، ایل، لی، ایم، ما، ایکس، چینګ، ایل، دو، پی، لیو، یو، 2017. د نظارت شوي څیز پراساس د ځمکې پوښ عکس طبقه بندي بیاکتنه. ISPRS J. انځورګرم. ریموټ حواس 130،
277-293 https://doi.org/10.1016/j.isprsjprs.2017.06.001
Maes, WH, Steppe, K., 2019. په دقیق کرهنه کې د بې پیلوټه الوتکو سره د ریموټ سینسنګ لپاره لید. Trends Plant Sci. 24 (2)، 152-164. https://doi.org/10.1016/j.tplants.2018.11.007.
مایماتیجیانګ، ایم، غلام، ا.، سیدیک، پی، هارتلینګ، ایس.، مایمیتیمینګ، ایم، پیټرسن، کی.، شاورز، ای، فشمین، جې، پیټرسن، جې، کدام، ایس. برکین، جې.، فریتشی، ایف، 2017.
د بې پیلوټه هوایی سیسټم (UAS) - د سویا بین فینوټایپینګ د څو سینسر ډیټا فیوژن او خورا زده کړې ماشین په کارولو سره. ISPRS J. انځورګرم. ریموټ سینس. 134، 43-58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
د سپوږمکۍ/UAV ډیټا فیوژن او ماشین زده کړې په کارولو سره د فصل څارنه. Remote Sensing 12 (9)، 1357. https://doi.org/10.3390/rs12091357.
منفریدا، ایس، مک کیب، ایم، ملر، پی، لوکاس، آر، پاجیلو مادریګال، وی، مالینس، جی، بین ډور، ای، هیلمن، ډی، ایسټس، ایل، سیراولو، جی. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth. ، B.، 2018. د بې پیلوټه هوایی سیسټمونو کارولو په اړه
د چاپیریال څارنه. Remote Sensing 10 (4)، 641.
مارینکو، RA، 1998. په مقالو کې د ښځو د مطالعاتو ژورنالونو ته حواله، 1989 او د سریال کتابتون 35 (1-2)، 29-44. https://doi.org/10.1300/J123v35n01_
03.
مسرور، آر.، نعیم، ایم.، اعجاز، W.، 2021. د UAV په مرسته بې سیم شبکې کې د سرچینو مدیریت: د اصلاح کولو لید. Ad Hoc شبکه. 121، 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. د ملټي سینسر UAV پلیټ فارم عملي غوښتنلیکونه په دقت کې د ملټي سپیکٹرل ، تودوخې او RGB لوړ ریزولوشن عکسونو پراساس
ویټيکلچر کرنه 8 (7)، 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. د دودیز NDVI شاخص څخه هاخوا د کلیدي فاکتور په توګه په دقیقه ویټیکچر کې د UAV کارولو اصلي جریان. ساینس تکرار 11 (1)، 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 د UAV، الوتکو سره پرتله کول
او د سپوږمکۍ ریموټ سینسنګ پلیټ فارمونه د دقیق ویټیکچر لپاره. Remote Sensing 7 (3)، 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. د دقیقیت لپاره د سپوږمکۍ لخوا چلول شوي نباتاتو شاخص د UAV او ماشین زده کړې پراساس اصلاح کول
کرنه سینسر 20 (9)، 2530. https://doi.org/10.3390/s20092530.
مکین، KW، 1990. په فکري ځای کې د لیکوالانو نقشه کول: تخنیکي کتنه. جې ام Soc. معلومات ساینس ۴۱ (۶)، ۴۳۳–۴۴۳.
Meinen, BU, Robinson, DT, 2021. د کرنې د تخریب ماډلینګ: د UAV د وخت لړۍ ډیټا په کارولو سره د USLE او WEPP په ساحه کې د تخریب اټکلونو ارزونه. چاپیریال. موډل. سافټویر 137، 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. د هایپرسپیکټرال بې پیلوټه الوتکې سیسټم (UAS) انځورونو په کارولو سره د ټیټ ځمکې اصلي شنو سیمو طبقه بندي
د تسمانیا منځنۍ سیمې ډرون ۳ (۱)، ۵.
میسینا، جی، موډیکا، جی.، 2020. په دقیق کرهنه کې د UAV حرارتي انځورونو غوښتنلیکونه: د هنر حالت او د راتلونکي څیړنې لید. Remote Sensing 12 (9)، https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. د لویو معلوماتو په اړه د کتابتون مطالعه: مفکورې، رجحانات او ننګونې. د سوداګرۍ پروسې مدیریت J. 23 (3)
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. د فصل ښه والی د ژوند دورې ډیټاسیټونو په کارولو سره چې د ساحې شرایطو لاندې ترلاسه شوي. مخکی. د نبات ساینس 6 https://doi.org/10.3389/
fpls.2015.00740.
موګیلي، UM.R.، دیپک، BBVL، 2018. په دقیقه کرنه کې د ډرون سیسټمونو د کارولو بیاکتنه. پروسیډیا کمپیوټر. ساینس 133، 502-509.
Moharana, S., Dutta, S., 2016. د هایپرسپیکٹرل عکس العمل څخه د وریجو د کلوروفیل او نایتروجن مینځپانګې ځایی تغیر. ISPRS J. انځورګرم. ریموټ سینس. 122، 17-29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
نیلور، پی.، 2019. د سمارټ فارم لپاره IoT او د کرنې ډاټا تحلیل. کمپیوټر الکترون. کرنه. ۱۵۶، ۴۶۷–۴۷۴.
نانسن، سي، ایلیوټ، این، 2016. په انټومولوژي کې د ریموټ سینسنګ او انعکاس پروفایل کول. انا Rev. Entomol. ۶۱ (۱)، ۱۳۹–۱۵۸. https://doi.org/61/annurev-ento1-139.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. په کرنه کې ملټي سپیکٹرل نقشه: د ځمکې موزیک د یو خپلواک کواډکوپټر UAV په کارولو سره. Int. conf.
د بې پیلوټه الوتکې سیسټم (ICUAS) 2016، 1351-1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.L., Nguyen, NG, 2020. د ډرون شیانو انټرنیټ (Iodt): د سمارټ ډرون راتلونکی تصور. adv Intel. سيسټ کمپیوټر 1045، 563-580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. د مایکرو UAV لپاره د سپک وزن ملټي سپیکٹرل سینسر — د خورا لوړ ریزولوشن هوایی ریموټ سینسنګ لپاره فرصتونه. Int. آرچ. انځورګرم. لرې حس. Inf. ساینس 37 (B1)، 1193-1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. په کرهنه کې د UAV غوښتنلیکونه. په 2019 کې د روبوټ استخباراتي ټیکنالوژۍ اووم نړیوال کنفرانس
غوښتنلیکونه (RiTA)، مخونه 254-257. https://doi.org/10.1109/RITAPP.2019.8932853
نیرور، SP، رشید، AA، نتاراجن، V.، 2008. د ستراتیژیک مدیریت ساحه فکري جوړښت: د لیکوال شریک تحلیل. ستراتیژی. اداره J. 29 (3)
319-336.
Neupane, K., Baysal-Gurel, F., 2021. د بې پیلوټه الوتکو په کارولو سره د نباتاتو د ناروغیو اتوماتیک پیژندنه او څارنه: یوه بیاکتنه. Remote Sensing 13 (19)، 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV د 3D نقشه کولو غوښتنلیکونو لپاره: یوه بیاکتنه. اپل. جیوماتیک 6 (1)، 1-15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. په دقیق کرهنه کې د کوچني UAVs سره د Evapotranspiration اټکل. سینسر 20 (22)، 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrics، د حوالې تحلیل او د حوالې تحلیل. د ادب بیاکتنه I 46 (3)، 149-158. https://doi.org/10.1515/libr.1996.46.3.149
P´adua, L., Vanko, J., Hruˇska, J., Ad˜ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS، سینسرونه، او په زراعتي ځنګلونو کې د معلوماتو پروسس کول: د عملي غوښتنلیکونو په اړه بیاکتنه. Int. J. Remote Sens. 38 (8-10)، 2349-2391. https://doi.org/10.1080/01431161.2017.1297548.
پانډی، متحده ایالات، پراتیهست، AK، آریال، J.، کایستا، RB، 2020. د غلو دانو فصلونو لپاره د ډرون پر بنسټ د معلوماتو حلونو بیاکتنه. ډرون 4 (3)، 1-29. https://doi.org/10.3390/
ډرون ۴۰۳۰۰۴۱
پارسایان، ایم، شهابي، ایم، حسن پور، ایچ.، 2020. د انځور پروسس کولو او مصنوعي عصبي شبکې په کارولو سره د تیو تخمونو د تیلو او پروټین مینځپانګې اټکل کول. جې ام تېل
د کیمیا پوهانو ټولنه ۹۷ (۷)، ۶۹۱–۷۰۲.
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´F., Suarez, O., د جوارو په لومړیو فصلونو کې د زیان رسوونکو واښو نقشه کول د شیانو پراساس تحلیل په کارولو سره د
د بې پیلوټه الوتکې (UAV) انځورونه. PLOS ONE 8 (10)، e77151.
پیریز-اورتیز، ایم، پینا، JM، ګوتیریز، PA، Torres-S' anchez، J. Herv' As-Martínez، C.
Lopez-Granados, ´F., 2015. د لمر ګل په فصلونو کې د زیان رسوونکو واښو نقشه کولو لپاره نیمه څارل شوی سیسټم د بې پیلوټه الوتکو او د کښت قطار کشف میتود په کارولو سره. اپل. نرم کمپیوټر. J. 37، 533-544. https://doi.org/10.1016/j.asoc.2015.08.027
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. د دقیق کرنې په برخه کې د بلاکچین پر بنسټ د اوبو مدیریت سیسټم لپاره د باور وړ معلوماتو سرچینې په توګه د لګښت اغیزمن IoT وسایل. کمپیوټر الکترون. کرنه. 180، 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. د دقیق کرنې په برخه کې د هوښیارې څارنې لپاره پرمختللي UAV-WSN سیسټم. سینسر 20 (3)، https://doi.org/10.3390/s20030817.
پورنډر، ایم، شی، وائی، سیورینګ، ایس، کوه، ایس ایل، 2020. د اکمالاتو ځنځیرونو، ټرانسپورټ او لوژستیک کې د بلاکچین غوښتنلیکونه: د ادبیاتو سیسټمیک بیاکتنه. Int. J. Prod. Res. 58 (7)، 2063-2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. د دقیق کرنې لپاره د انعطاف وړ بې پیلوټه الوتکې.
دقیق. کرنه. ۱۳ (۴)، ۵۱۷–۵۲۳. https://doi.org/13/s4-517-523-10.1007.
پریچارډ، الف، 1969. احصایوي کتابتون یا کتابیات. J. سند. ۲۵ (۴)، ۳۴۸–۳۴۹.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. د تجربوي ساحو او فصلونو د ارزونې لپاره د بې پیلوټه الوتکې (UAV) مناسبیت. کرنه 99 (4)، 431-436.
Puri, V., Nayyar, A., Raja, L., 2017. د کرنې بې پیلوټه الوتکې: د کرنې په برخه کې یو عصري پرمختګ. J. Statis. اداره سيسټ 20 (4)، 507-518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. د دقیق کرنې لپاره د UAV غوښتنلیکونو تالیف. کمپیوټر شبکه ۱۷۲،
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. د کرنې په څیړنه کې د لوی ډیټا تحلیلونو او مصنوعي استخباراتو غوښتنلیک. هندي J. Agron. ۶۵ (۴)، ۳۸۳–۳۹۵.
Raparelli, E., Bajocco, S., 2019. د کرنې او ځنګلونو په مطالعاتو کې د بې پیلوټه الوتکو د کارولو په اړه د بائبلیومیټریک تحلیل. Int. J. Remote Sens. 40 (24)،
9070-9083 https://doi.org/10.1080/01431161.2019.1569793.
راسموسن، جې، نیلسن، ج.، ګارسیا-رویز، ایف، کریسټینسن، ایس، سټریبیګ، جي سي، لوټز، بی، ۲۰۱۳.
د زیان رسوونکو واښو په څیړنه کې د کوچني بې پیلوټه الوتکو سیسټمونو (UAS) احتمالي کارول. Weed Res. ۵۳ (۴)، ۲۴۲–۲۴۸.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S. د نباتاتو شاخصونه دي چې د مصرف کونکي درجې کیمرې څخه اخیستل شوي دي
UAVs د تجربوي پلاټونو ارزولو لپاره کافي اعتبار لري؟ یورو. J. Agron. ۷۴، ۷۵-۹۲. https://doi.org/74/j.eja.75.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. د خوراکي توکو د رسولو په زنځیرونو کې ډیجیټل کول: د کتابونو بیاکتنه او د کلیدي لارې اصلي لاره
تحلیل دوام 14 (1)، 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmier, H., 2021a. د اکمالاتو لړۍ مدیریت او لوژستیک لپاره ډرون: د بیاکتنې او څیړنې اجنډا. Int. J. لوجیست. Res. اپل.
1-24 https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmier, H., 2021b. په لوژستیک او د اکمالاتو سلسله مدیریت کې د بلاکچین ټیکنالوژي: د بائبلومیټریک بیاکتنه. لوژستیک ۵ (۴)، ۷۲.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmier, H., 2021c. بشردوستانه ډرون: د بیاکتنې او څیړنې اجنډا. د شیانو انټرنیټ 16، 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. په روغتیایی پاملرنې کې د بلاکچین څیړنه: د بائبلومیټریک بیاکتنه او د اوسني څیړنې رجحانات. J. of Data, Inf. او
اداره ۳ (۲)، ۱۰۹–۱۲۴.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. د اکمالاتو سلسلې مدیریت او لوژستیک کې د شیانو انټرنېټ څیړنه: یو بایبلومیټریک تحلیل. انټرنیټ
د شیانو 12، 100318.
راپور لینکر، 2021. د نړیوال کرهنیز ډرون بازار به د کال د ګلوبی نیوز وائر نیوز روم لخوا 15.2 ملیارد ډالرو ته ورسیږي. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- کال-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´opez, ´D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. د تودوخې کیمرې غیر یخ شوی کیلیبریشن او اصلاح کول
په کرنه کې د UAV غوښتنلیکونو لپاره د فوتوګرامیري پروسه. سینسر (سویټزرلینډ) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. د میلمه پالنې په څیړنه کې پرمختګونه: "له روډني ډنجرفیلډ څخه اریتا فرانکلین ته". Int. J. معاصر. روغتون. اداره ۲۷ (۳)
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. په شنو خونو کې د چاپیریال متغیرونو اندازه کولو لپاره د مینی UAV پراساس حسي سیسټم. سینسر 15 (2)، 3334-3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. د مصرف کونکي درجې UAV د سوداګریزو پیازو په کروندو کې د وروستي فصل د زیان رسوونکو واښو ځایي توزیع نمونو کشف او تحلیل لپاره کارول کیږي. دقیق. کرنه. 22 (4)، 1317-1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. بې پیلوټه هوایی موټر (UAV) د ځنګل او کرنې غوښتنلیکونو لپاره د سپیکٹرل کیمرې سیسټم چلوي. پرمخ لاړ شه. SPIE – Int. Soc. غوره انج. 8174 https://doi.org/10.1117/12.897585.
ساه، بی، ګپتا، آر، بني هاني، ډي، 2021. د ډرون لوژستیک پلي کولو لپاره د خنډونو تحلیل. Int. J. لوجیست. Res. اپل. ۲۴ (۶)، ۵۳۱–۵۵۰. https://doi.org/24/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chatopadhyay, SP, & Saha, HN, IOT پر بنسټ ډرون د کرنې په ساحه کې د فصل کیفیت ښه کولو لپاره. په SH
N. Chakrabarti S. (Ed.)، 2018 IEEE اتم کلنی کمپیوټینګ او د مخابراتو ورکشاپ او کنفرانس، CCWC 8 (Vols. 2018-جنوري، pp. 2018-612). انستیتوت
د بریښنا او بریښنایی انجینرانو شرکت doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: د دقیق کرنې لپاره د LED پر بنسټ یو ناول او اغیزمن اړیکه. IEEE Conf. معلومات کمیون. ټیکنالوژي. 2019، 1-5. https://doi.org/10.1109/CICT48419.2019.9066177.
سلامي، ای.، باراډو، سي.، پاستور، ای.، 2014. د UAV الوتنې تجربې د نباتاتو سیمو د لیرې سینس کولو لپاره پلي شوي. Remote Sensing 6 (11)، 11051–11081. https://doi.org/10.3390/rs61111051.
سنکران، ایس، کوت، ایل آر، ایسپینوزا، سی زیډ، جارولمسجید، ایس، ستووالی، وی آر، وینډیمارک، جی جے، میکلاس، پی این، کارټر، AH، پمپفری، MO، نولس، NRN، Pavek، MJ، 2015.
د قطار او ساحې فصل فینوټایپینګ لپاره ټیټ لوړوالی ، د لوړ ریزولوشن هوایی عکس العمل سیسټمونه: بیاکتنه. یورو. J. Agron. 70، 112-123. https://doi.org/10.1016/j
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. د اټکل کولو لپاره د لوړ ریزولوشن UAV پر بنسټ حرارتي امیجنگ
د انګورو په باغ کې د نبات د اوبو وضعیت سمدستي او موسمي تغیر. زراعت د اوبو مدیریت. ۱۸۳، ۴۹-۵۹. https://doi.org/183/j.agwat.49.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. د حوالې تحلیل څخه هاخوا: د څیړنې اغیزې ارزونې ماډل. J. میډ د کتابتون ټولنه : JMLA 98 (1)، 17-23. https://doi.org/10.3163/1536-5050.98.1.008
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J. Liang, S. ریموټ حواس. چاپیریال. 2009، S113-S123.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. د ټیټ لګښت UAV سره د ژمي د غنمو د فصلونو د زراعتي پیرامیټونو څارنه
انځورګري Remote Sensing 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. د پورتنۍ دقیق ایربیولوژیکي نمونې لپاره د خپلواک بې پیلوټه الوتکې پراختیا او غوښتنلیک
د کرنې ساحې. J. فیلډ روب. 25 (3)، 133-147. https://doi.org/10.1002/rob.20232.
شادرین، ډي، مینشچیکوف، ا.، سوموف، ا.، بورنمن، جی، هاسلاج، ج.، فیدوروف، ایم.
د مصنوعي استخباراتو سره د ځای پر ځای شوي سینسنګ له لارې دقیق کرنې وړ کول. IEEE ټرانس. وسیله میس ۶۹ (۷)، ۴۱۰۳–۴۱۱۳.
شطرح، ح.، صوالمه، هـ، الفقہ، الف، دو، ذ، المیتا، ای.، خلیل، اول.
Othman, NS, Khreishah, A., Guizani, M., 2019. بې پیلوټه الوتکې (UAVs): د ملکي غوښتنلیکونو او کلیدي څیړنو ننګونو په اړه یوه سروې. IEEE لاسرسی 7،
۴۸۵۷۲–۴۸۶۳۴ https://doi.org/48572/ACCESS.48634.
شکور، این.، نارتروپ، ډي.، موری، ایس، موکلر، TC، 2019. د کرنې لوی معلومات: د نبات په نسل کې د لوی معلوماتو تحلیلونه، جینومکس، او د ریموټ سینسنګ کارول
د حاصلاتو د لوړولو لپاره ټیکنالوژي. د نبات فینوم J. 2 (1)، 1-8.
شرما، BK، چندرا، جی، مشرا، VP، 2019. په عدلي تحقیقاتو کې د UAV او AI مقایسه تحلیل او اغیز. په کې: پروسیډینګز – ۲۰۱۹ امیتي انټرنیشنل
د مصنوعي استخباراتو کنفرانس. https://doi.org/10.1109/AICAI.2019.8701407.
شرما، آر.، شیشودیا، A.، Gunasekaran، A.، Min، H.، Munim، ZH، 2022. د اکمالاتو لړۍ مدیریت کې د مصنوعي استخباراتو رول: د سیمې نقشه کول. Int. ج.
پروډ. Res. 1-24 https://doi.org/10.1080/00207543.2022.2029611.
شی، وائی، توماسسن، JA، موری، SC، پګ، NA، روونی، WL، شافیان، ایس، راجن، این، روز، جی، مورګان، سی ایل ایس، نیلی، ایچ ایل، رانا، A.، باګواتیانان MV
هینریکسن، جې، بوډن، ای، ویلاسیک، جې، اولسن هولر، جې، بشپ، ایم پی، شیریډن، آر، پوټمن، ای بی، پوپیسکو، ایس، بورکس، ټي، کوپ، ډي، ابراهیم A.، McCutchen، BF،
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. بې پیلوټه الوتکې د لوړې کچې فینوټایپینګ او زراعتي څیړنې لپاره. PLOS ONE
11 (7)، e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. د بې پیلوټه الوتکې په کارولو سره د حاصلاتو - ثبات زونونو کې د جوارو موقف توپیر کول
موټرې (UAV). سینسر 19 (20)، 4446. https://doi.org/10.3390/s19204446.
سمال، ایچ.، 1973. په ساینسي ادب کې همغږي کول: د دوو اسنادو ترمنځ د اړیکو نوې اندازه. جې ام Soc. معلومات ساینس 24 (4)، 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. د حوالې نقشې په واسطه د ساینس لید. جې ام Soc. معلومات. ساینس 50 (9)، 799-813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. په لویو څړځایونو کې د جغرافیه شوي هوایی عکسونو سره په ځنګل کې د څارویو شمیرل. کمپیوټر الکترون. کرنه. 189، 106354 https://doi.org/10.1016/j.compag.2021.106354.
سریواستو، K.، پانډی، PC، شرما، JK، 2020. د UAVs په کارولو سره د دقیق کرنې په غوښتنلیکونو کې د لارې د اصلاح لپاره یوه تګلاره. ډرون 4 (3)، 58. https://doi.org/ 10.3390/drones4030058.
سټیفورډ، JV، 2000. په 21 پیړۍ کې دقیق کرهنیز پلي کول. J. زراعت انج. Res. 76 (3)، 267-275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. د بې پیلوټه الوتکې په کارولو سره د لیرې سینسنګ عکس العمل په واسطه د غنمو وچکالۍ ارزونه. په 2018 کې د چین د کنټرول 37م کنفرانس (CCC)
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. د غنمو ژیړ زنګ د ملټي سپیکٹرل UAV هوایی عکس العمل څخه زده کولو سره څارنه.
کمپیوټر الکترون. کرنه. ۱۵۵، ۱۵۷-۱۶۶. https://doi.org/155/j compag.157.
Su, Y., Wang, X., 2021. د لوی ډیټا لخوا د سمارټ کرنې د جوړولو په پروسه کې د کرنې اقتصادي مدیریت نوښت. دوامداره کمپیوټر. Inf. سيسټ 31، 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. د پنبې په کنډو کې د اوبو فشار کشف کولو لپاره د بې پیلوټه حرارتي انفراریډ هوایی سیسټم حساسیت ارزونه. ټرانس. ASABE 50 (6)، 1955-1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. د RGB پر بنسټ د نباتاتو شاخص ادغام، د فصل سطحه ماډل او د بې پیلوټه الوتکې په کارولو سره د ګني د حاصلاتو اټکل لپاره د اعتراض پر بنسټ د عکس تحلیل طریقه. کمپیوټر الکترون. کرنه. 180، 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. لپاره د سپک وزن هایپرسپیکٹرل نقشه کولو سیسټم
بې پیلوټه الوتکې - لومړنۍ پایلې. په 2013 کې د هایپرسپیکٹرل عکس او سیګنال پروسس کولو په اړه پنځم ورکشاپ: په ریموټ سینسنګ کې ارتقاء (WHISPERS)، مخ 5-1. https://doi.org/4/WHISPERS.10.1109.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L. 2014. یو لږ وزن لرونکي هایپرسپیکٹرل
د بې پیلوټه الوتکو لپاره د نقشه کولو سیسټم او د فوټوګرامیټریک پروسس کولو سلسله. Remote Sensing 6 (11)، 11013–11030. https://doi.org/10.3390/
rs61111013.
سیده، IH، عالم، MM، الهی، U.، سعود، MM، 2021. په کرنه کې د عکس پروسس کولو، UAV او AI په کارولو سره د کنټرول پرمختللي ستراتیژۍ: یوه بیاکتنه. نړۍ J. انجینر. ۱۸ (۴)
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. د معلوماتو پروسس کول د حوالې په کارولو سره په محاسبه کې د ژورنالیزم نفوذ تحقیق کولو لپاره. Inf. پروسه. اداره کول. 34 (2-3)، 341-359.
تانګ، Y.، داننجیان، S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. د 5G شبکې په اړه یوه سروې او په کرنه باندې د هغې اغیز: ننګونې او فرصتونه. کمپیوټر
الکترون. کرنه. 180، 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. د کرهنې په کرهنه کې د معلوماتو پر بنسټ پریکړه کول: په کرهنیز سیسټمونو کې د لویو معلوماتو زیاتوالی. J. زراعت د خوړو معلومات.
20 (4) ، 344–380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. د UAV په کارولو سره د ژمي د غنمو د حاصلاتو او نبات لوړوالی اټکل پر بنسټ د هایپرسپیکٹرل انځورونه
سینسر ۲۰ (۴)، ۱۲۳۱.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. د دوه خپلواکه بې پیلوټه الوتکو په کارولو سره په ټیټ اتموسفیر کې د نبات د رنځجن همغږي شوي ایربیولوژیکي نمونې. J. فیلډ روب. 27 (3)، 335-343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. د ژورې زده کړې په کارولو سره د سویابین آفتونو کشف او طبقه بندي
د UAV انځورونو سره. کمپیوټر الکترون. کرنه. ۱۷۹، ۱۰۵۸۳۶.
Thamm, H.P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. په تنزانیا کې په AN لندبل کې د کرهنیز سیسټمونو ارزونې لپاره د Uas کارول - او د دوامدار کرنې لپاره WetSeason او د Terra-Sar X ډیټا لپاره د ځمکني حقیقت چمتو کول. په کې: ISPRS – د فوټوګرامیټرۍ نړیوال آرشیف، د ریموټ سینسنګ او ځایي معلوماتو ساینس، مخونه 401-406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall، M.، 2008. Bibliometrics to webometrics. J. معلومات. ساینس 34 (4)، 605-621.
Torres-Sanchez, ´J., Lopez-Granados, ´F., Pena, ˜ JM, 2015. د UAV انځورونو کې د مطلوب حد لپاره د اتوماتیک څیز پر بنسټ میتود: په بوټو کې د نباتاتو د کشف لپاره غوښتنلیک. کمپیوټر الکترون. کرنه. 114، 43-52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´J., Lopez-Granados, ´F., Serrano, N., Arquero, O., Pena, JM, Hassan, QK, 2015. د کرنې - ونو کښتونو د 3-D لوړ پوړ څارنه د بې پیلوټه الوتکې (UAV) ټیکنالوژي. PLOS ONE 10 (6)، e0130479.
Torres-Sanchez, ´J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´F., 2014. د UAV څخه د عکسونو په کارولو سره د فصل په لومړیو فصلونو کې د غنمو په کروندو کې د نباتاتو څو لنډمهاله نقشه. کمپیوټر الکترون. کرنه. 103، 104-113. https://doi.org/10.1016/j compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. د دقیق کرنې لپاره د UAV پر بنسټ غوښتنلیکونو بیاکتنه. معلومات (سویټزرلینډ) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. د باغدارۍ د ونو فصل جوړښت اندازه کولو لپاره د ډرون الوتنې پلان اصلاح کول. ISPRS J. انځورګرم.
ریموټ سینس. 160، 83-96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. په کرنه کې د شیانو انټرنیټ، وروستي پرمختګونه او راتلونکي ننګونې. Biosyst. انج. 164، 31-48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
اډین، اې، سنګ، وی، پینټ، ډی، اولموس، I.، 2015. په مکسیکو کې د کمپیوټر ساینس څیړنې ساینټومیټریک نقشه. ساینټومیټریک 105 (1)، 97-114.
UN.، 2019. د نړۍ نفوس 2019. https://population.un.org/wpp/ (په 15/04/2022 لاسرسی شوی).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. د UAV نصب شوي کوچني هایپرسپیکٹرل سینسر سیسټم لخوا د وریجو د بڼونو ځانګړتیا. IEEE J. Sel. پورته. اپل. د ځمکې Obs.
ریموټ سینس. 6 (2)، 851-860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. ډرونونه په
کرنه adv اګرون. 162، 1-30.
ویلسامي، پی، راجندران، ایس، مهندران، آر کی، نصیر، ایس، شفیق، ایم، چوی، جې-جی، 2022.
بې پیلوټه الوتکې (UAV) په دقیق کرنې کې: غوښتنلیکونه او ننګونې. انرژی 15 (1)، 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. د بې پیلوټه الوتکې په کارولو سره د ایکولوژیکي پلوه حساس سمندري استوګنځایونو نقشه او طبقه بندي
د وسایطو (UAV) انځور او د اعتراض پر بنسټ د انځور تحلیل (OBIA). Remote Sensing 10 (9)، 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch'eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. د غنمو او ریپسیډ فصلونو په اړه د بې پیلوټه هوایی سیسټم څخه د شنه ساحې شاخص . ریموټ حواس. چاپیریال. 152، 654-664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. په واښه کې د څلورو نظری UAV-based سینسرونو ځای په ځای کول: ننګونې او
محدودیتونه بیولوژیکي ساینس 12 (1)، 163-175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. په دقیق کرهنه کې د ځمکې لاندې شیانو انټرنیټ: معمارۍ او ټیکنالوژي اړخونه. Ad Hoc شبکه. ۸۱،
160-173 https://doi.org/10.1016/j.adhoc.2018.07.017
Wamba, SF, Queiroz, MM, 2021. د ډیجیټل روغتیا لپاره د پټ اجزا په توګه مسؤل مصنوعي استخبارات: د بائبلومیټریک تحلیل، بصیرت، او د څیړنې لارښوونې.
معلومات. سيسټ مخکی. 1-16
وانګ، ایل، ژانګ، جی، وانګ، زی، لیو، جې، شینګ، جې، لیانګ، ایل، 2019. د فصل د ودې د څارنې په برخه کې د ریموټ سینسنګ څیړنې رجحان Bibliometric شننه: په چین کې د قضیې مطالعه. Remote Sensing 11 (7). https://doi.org/10.3390/rs11070809.
وایټ، HD، ګریفیت، BC، 1981. د لیکوال کوټیشن: د فکري جوړښت د ادب اندازه. جې ام Soc. معلومات ساینس 32 (3)، 163-171.
Xiang, H., Tian, L.، 2011. د یو خپلواک بې پیلوټه الوتکې (UAV) پر بنسټ د ټیټ لګښت کرهنیز ریموټ سینسنګ سیسټم پراختیا. Biosyst. انج. 108 (2)، 174-190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. د UAV پراساس سینسرونو په کارولو سره د نبات د لوړې کچې فینوټائپ کولو ځانګړتیاو په اړه بیاکتنه. کمپیوټر الکترون. کرنه. 178، 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. د ریموټ سینسنګ غوښتنلیکونو لپاره بې پیلوټه هوایی موټر — بیاکتنه. Remote Sensing 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. د ملټيروټر په واسطه د انفراریډ حرارتي عکس العمل سره د خلکو تعقیب او غلط ټریک لرې کول. ډرون 5 (3)، 65. https://doi.org/10.3390/drones5030065.
یو، جی، فینګ، ایچ، جین، ایکس، یوان، ایچ، لی، زی، ژو، سی، یانګ، جی، تیان، کیو، 2018. د انځورونو په کارولو سره د فصل پیرامیټرو اټکل پرتله کول له UAV څخه نصب شوی
سنیپ شاټ هایپرسپیکٹرل سینسر او د لوړ تعریف ډیجیټل کیمره. Remote Sensing 10 (7)، 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. د بې پیلوټه الوتکې په کارولو سره د ځمکې څخه پورته د ژمی د غنمو اټکل پر بنسټ انځور
د هایپرسپیکٹرل سینسر او د فصل لوړوالی ښه شوي ماډلونه. Remote Sensing 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. د استوایی ځنګلونو د بیا رغونې د څارنې لپاره د سپک وزن لرونکي بې پیلوټه الوتکو کارول. بایول.
ساتل ۱۸۶، ۲۸۷–۲۹۵. https://doi.org/186/j.biocon.287. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 295.
د څنډې او کلاوډ کمپیوټري پراساس د سمارټ فارمینګ IoT پلیټ فارم. Biosyst. انج. ۱۷۷،
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. د بې پیلوټه الوتکې څخه ترلاسه شوي د خورا لوړ ریزولوشن عکسونو په کارولو سره د ونې لوړوالی اندازه کول
د موټرو (UAV) او اتوماتیک 3D عکس بیارغونې میتودونه. یورو. J. Agron. ۵۵، ۸۹-۹۹. https://doi.org/55/j.eja.89
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. د یخ موسم فصلونو کې د ګل کولو شدت د انځور پر بنسټ فینوټایپنګ. سینسر 20 (5)، 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. د دقیق کرنې لپاره د کوچني بې پیلوټه هوایی سیسټمونو غوښتنلیک: بیاکتنه. دقیق. کرنه. ۱۳ (۶)، ۶۹۳–۷۱۲. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. د UAV ملټي سپیکٹرل ریموټ سینسنګ پراساس د جوار د اوبو فشار نقشه کول. Remote Sensing 11 (6)، 605.
جانګ، ایکس، هان، ایل، دونګ، یو، شی، یو، هوانګ، وا، هان، ایل، ګونز الیز مورینو، پی، ما، ایچ، یی، ایچ، سوبیه , T., 2019. د اتومات ژیړ زنګ لپاره د ژورې زده کړې پراساس چلند
د لوړ ریزولوشن هایپرسپیکٹرل UAV عکسونو څخه د ناروغۍ کشف. Remote Sensing 11 (13)، 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. د چای د نباتاتو د ناروغیو او حشراتو فشار کشف او تبعیض د هایپرسپټرل امیجنګ په کارولو سره د موج تحلیل سره یوځای. کمپیوټر الکترون. کرنه. 193، 106717 https://doi.org/10.1016/j. compag.2022.106717.
ژینګ، ا.، وانګ، ایم.، لی، سي.، تانګ، جې، لو، بی، 2022. د هوایی عکس سیمانټیک قطع کولو لپاره د انټروپي لارښود مخالف ډومین موافقت. IEEE ټرانس. ج
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. د ځمکې پر بنسټ د طیف د وخت د سلسلې تحلیل له لارې د وریجو فینولوژي کشف د شاخص ډاټا. د ساحې فصلونه Res. 198، 131-139. https://doi.org/10.1016/j.fcr.2016.08.027
Zheng, J., Yang, W., 2018. د بېسیم سینسرونو پراساس د دقیق کرنې لیکې تخم تخم کولو سیسټم ډیزاین. Int. J. آنلاین انجینر. ۱۴ (۰۵)، ۱۸۴.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. د UAV-LiDAR ډیټا په کارولو سره د کښت شوي جوارو د لوړوالي بدلون تحلیل. کرنه 10 (5)، 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: د جوار د انځور تحلیل سافټویر چې د لوړې کچې بوټو فینوټایپ کولو لپاره ژورې زده کړې کاروي . د نبات طریقې 17 (1)، 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. د غنمو د حاصلاتو وړاندوینه وریجی د څو اړخیزو نباتاتو په کارولو سره
شاخصونه د UAV پر بنسټ ملټي سپیکٹرل او ډیجیټل عکس العمل څخه. ISPRS J. انځورګرم. ریموټ سینس. 130، 246-255. https://doi.org/10.1016/j.isprsjprs.2017.05.003
Zhou, Y., Xie, Y., Shao, L., 2016. د بې سیم سینسر شبکې پراساس د شنو خونو د څارنې سیسټم د اصلي ټیکنالوژۍ سمول. Int. J. آنلاین انجینر. ۱۲ (۰۵)
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. په دقیق کرهنه کې د انفراریډ حرارتي عکس العمل سره د فصل د اوبو فشار ارزونه: یوه بیاکتنه
او د ژورې زده کړې غوښتنلیکونو لپاره راتلونکي امکانات. کمپیوټر الکترون. کرنه. 182، 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}